


It is an unfortunate fact that no single turbulence model is universally accepted as being superior for all classes of problems. The choice of turbulence model will depend on considerations such as the physics of the flow, the established practice for a specific class of problem, the level of accuracy required, the available computational resources, and the amount of time available for the simulation. To make the most appropriate choice of model for your application, you need to understand the capabilities and limitations of the various options.
The default model,  -
- SST, is adequate for most engineering flows, however, you may need to
choose a different model depending on your simulation needs. You can select an
alternative model as the default using the Flow Model drop-down
list in the Simulation branch of Preferences
(File > Preferences...).
SST, is adequate for most engineering flows, however, you may need to
choose a different model depending on your simulation needs. You can select an
alternative model as the default using the Flow Model drop-down
list in the Simulation branch of Preferences
(File > Preferences...).
Note: The default turbulence model will be selected if you load a mesh file into the Fluent solver or if you load/create a mesh in Fluent Meshing and switch to solution mode.
It will not affect existing case files.
This section gives an overview of issues related to the turbulence models provided in Ansys Fluent. The computational effort and cost in terms of CPU time and memory of the individual models is discussed. While it is impossible to state categorically which model is best for a specific application, general guidelines are presented to help you choose the appropriate turbulence model for the flow you want to model.
Note: For information on turbulence model compatibility with other Fluent models, see Appendix A: Ansys Fluent Model Compatibility.
For additional information, see the following sections:
RANS models (Reynolds (Ensemble) Averaging in the Theory Guide) offer
the most economic approach for computing complex turbulent industrial
flows. Typical examples of such models are the  -
- or the
or the  -
- models in their different
forms. These models simplify the problem to the solution of two additional
transport equations and introduce an Eddy-Viscosity (turbulent viscosity)
to compute the Reynolds Stresses. More complex RANS models are available
that solve an individual equation for each of the six independent
Reynolds Stresses directly (Reynolds Stress Models – RSM) plus
a scale equation (
models in their different
forms. These models simplify the problem to the solution of two additional
transport equations and introduce an Eddy-Viscosity (turbulent viscosity)
to compute the Reynolds Stresses. More complex RANS models are available
that solve an individual equation for each of the six independent
Reynolds Stresses directly (Reynolds Stress Models – RSM) plus
a scale equation ( -equation or
-equation or  -equation). RANS models are
suitable for many engineering applications and typically provide the
level of accuracy required. Since none of the models is universal,
you have to decide which model is the most suitable for a given applications.
-equation). RANS models are
suitable for many engineering applications and typically provide the
level of accuracy required. Since none of the models is universal,
you have to decide which model is the most suitable for a given applications.
The Spalart-Allmaras model is a relatively simple one-equation model that solves a modeled transport equation for the kinematic eddy (turbulent) viscosity. The Spalart-Allmaras model was designed specifically for aeronautics and aerospace applications involving wall-bounded flows and has been shown to give good results for boundary layers subjected to adverse pressure gradients. It is also gaining popularity in turbomachinery applications. Do not use the model as a general purpose model, as it is not well calibrated for free shear flows (large errors for example, jet flows).
The Spalart-Allmaras model has been extended within Ansys Fluent with a
 -insensitive wall treatment, which automatically blends all
solution variables from their viscous sublayer formulation to the corresponding
logarithmic layer values depending on
-insensitive wall treatment, which automatically blends all
solution variables from their viscous sublayer formulation to the corresponding
logarithmic layer values depending on  . The blending is calibrated to also cover intermediate
. The blending is calibrated to also cover intermediate
 values in the buffer layer
values in the buffer layer 
Two-equation models are historically the most widely used turbulence models in
industrial CFD. They solve two transport equations and model the Reynolds
Stresses using the Eddy Viscosity approach. The standard  -
- model in Ansys Fluent falls within this class of models and has
become the workhorse of practical engineering flow calculations in the time
since it was proposed by Launder and Spalding [84]. Robustness, economy, and reasonable
accuracy for a wide range of turbulent flows explain its popularity in
industrial flow and heat transfer simulations.
model in Ansys Fluent falls within this class of models and has
become the workhorse of practical engineering flow calculations in the time
since it was proposed by Launder and Spalding [84]. Robustness, economy, and reasonable
accuracy for a wide range of turbulent flows explain its popularity in
industrial flow and heat transfer simulations.
The draw-back of some  -
- models is their insensitivity to adverse pressure gradients
and boundary layer separation. They typically predict a delayed and reduced
separation relative to observations. This can result in overly optimistic design
evaluations for flows that separate from smooth surfaces (for example,
aerodynamic bodies, diffusers). The
models is their insensitivity to adverse pressure gradients
and boundary layer separation. They typically predict a delayed and reduced
separation relative to observations. This can result in overly optimistic design
evaluations for flows that separate from smooth surfaces (for example,
aerodynamic bodies, diffusers). The  -
- model is therefore not widely used in external aerodynamics.
model is therefore not widely used in external aerodynamics.
In Ansys Fluent, the use of the Realizable  -
- model is recommended relative to other variants of the
model is recommended relative to other variants of the
 -
- family. You should use the
family. You should use the  -
- model in combination with either the Enhanced Wall Treatment
(EWT-
model in combination with either the Enhanced Wall Treatment
(EWT- ) or the Menter-Lechner near-wall treatment. For details, refer
to Enhanced Wall Treatment ε-Equation (EWT-ε) or Menter-Lechner ε-Equation (ML-ε) in the Theory Guide, respectively.
For cases where the flow separates under adverse pressure gradients from smooth
surfaces (airfoils, and so on),
) or the Menter-Lechner near-wall treatment. For details, refer
to Enhanced Wall Treatment ε-Equation (EWT-ε) or Menter-Lechner ε-Equation (ML-ε) in the Theory Guide, respectively.
For cases where the flow separates under adverse pressure gradients from smooth
surfaces (airfoils, and so on),  -
- models are generally not recommended.
models are generally not recommended.
The  -equation offers several advantages relative to the
-equation offers several advantages relative to the
 -equation. The most prominent one is that the equation can be
integrated without additional terms through the viscous sublayer. This makes the
formulation of a robust
-equation. The most prominent one is that the equation can be
integrated without additional terms through the viscous sublayer. This makes the
formulation of a robust  -insensitive treatment relatively straightforward. Refer to
y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Theory Guide for details.
Furthermore,
-insensitive treatment relatively straightforward. Refer to
y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Theory Guide for details.
Furthermore,  -
- models are typically better at predicting adverse pressure
gradient boundary layer flows and separation. The downside of the standard
models are typically better at predicting adverse pressure
gradient boundary layer flows and separation. The downside of the standard
 -equation is a relatively strong sensitivity of the solution
depending on the freestream values of
-equation is a relatively strong sensitivity of the solution
depending on the freestream values of  and
and  outside the shear layer. The use of the standard
outside the shear layer. The use of the standard
 -
- model is, for this reason, not generally recommended in
Ansys Fluent.
model is, for this reason, not generally recommended in
Ansys Fluent.
The BSL and SST  -
- models have been designed to avoid the freestream sensitivity
of the standard
models have been designed to avoid the freestream sensitivity
of the standard  -
- model, by combining elements of the
model, by combining elements of the  -equation and the
-equation and the  -equation. In addition, the SST model has been calibrated to
accurately compute flow separation from smooth surfaces. Within the
-equation. In addition, the SST model has been calibrated to
accurately compute flow separation from smooth surfaces. Within the
 -
- model family, it is therefore recommended to use either the
BSL or SST model. These models are some of the most widely used models for
aerodynamic flows. They are typically somewhat more accurate in predicting the
details of the wall boundary layer characteristics than the Spalart-Allmaras
model.
model family, it is therefore recommended to use either the
BSL or SST model. These models are some of the most widely used models for
aerodynamic flows. They are typically somewhat more accurate in predicting the
details of the wall boundary layer characteristics than the Spalart-Allmaras
model.
The BSL and SST models (like all other  -equation based models) use a
-equation based models) use a  -insensitive wall treatment. For details on the available
options, see y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Fluent Theory Guide.
-insensitive wall treatment. For details on the available
options, see y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Fluent Theory Guide.
Note that the turbulence default option as of Fluent 2020 R1, the
- SST model, provides low levels of eddy viscosity (compared to
 -
- ) and hence can predict physical phenomenon such as separation
more accurately, although this may make it less stable in some cases and some
solver settings may need to be updated for proper convergence.
) and hence can predict physical phenomenon such as separation
more accurately, although this may make it less stable in some cases and some
solver settings may need to be updated for proper convergence.
For the  -
- models, so-called low Reynolds number terms (low Re) have been
proposed by Wilcox. These are available in Ansys Fluent as an option. It is
important to point out that these terms are not required for integrating the
equations through the viscous sublayer. Their main influence lies in mimicking
laminar-turbulent transition processes. However, this functionality is not
widely calibrated and for wall-boundary layer transition, the combination of the
SST model with the Transition SST model (Transition SST Model in the Theory Guide), Intermittency Transition Model
(Intermittency Transition Model in
the Theory Guide), or the
Transition
models, so-called low Reynolds number terms (low Re) have been
proposed by Wilcox. These are available in Ansys Fluent as an option. It is
important to point out that these terms are not required for integrating the
equations through the viscous sublayer. Their main influence lies in mimicking
laminar-turbulent transition processes. However, this functionality is not
widely calibrated and for wall-boundary layer transition, the combination of the
SST model with the Transition SST model (Transition SST Model in the Theory Guide), Intermittency Transition Model
(Intermittency Transition Model in
the Theory Guide), or the
Transition  -
- -
- model (k-kl-ω Transition Model in the Theory Guide) is more reliable. The use of the
low-Re terms is therefore not encouraged.
model (k-kl-ω Transition Model in the Theory Guide) is more reliable. The use of the
low-Re terms is therefore not encouraged.
The goal of the GEKO model is to offer a single model with enough flexibility to cover a wide range of applications. Although most applications are already covered by the default settings, the model provides four free parameters that can be adjusted for specific types of applications, without negative impact on the basic calibration of the model. This is a powerful tool for model optimization, but requires a proper understanding of the impact of these coefficients to avoid mistuning. It is important to emphasize that the model has strong defaults, so you can also apply the model without any fine-tuning and that you should make sure that any tuning is supported by high-quality experimental data.
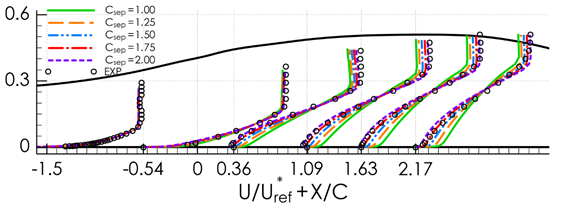
In most cases, you need to only adjust  to change the GEKO model’s sensitivity to boundary
layer separation. The figure below shows the impact of this parameter for a
diffuser flow [39]. With
to change the GEKO model’s sensitivity to boundary
layer separation. The figure below shows the impact of this parameter for a
diffuser flow [39]. With  , the model behaves essentially the same as the
, the model behaves essentially the same as the  model (no separation) and with
model (no separation) and with  , close to perfect agreement with the data is achieved (like
the SST model [99]). Larger values for
, close to perfect agreement with the data is achieved (like
the SST model [99]). Larger values for
 can be required (for example, when simulating high-lift
airfoils, where even the SST model tends to under-estimate separation strength).
can be required (for example, when simulating high-lift
airfoils, where even the SST model tends to under-estimate separation strength).
Figure 15.1: Velocity Profiles for Axi-symmetric Diffuser Flow (Case CS0 –
Driver). Impact of Variation of 
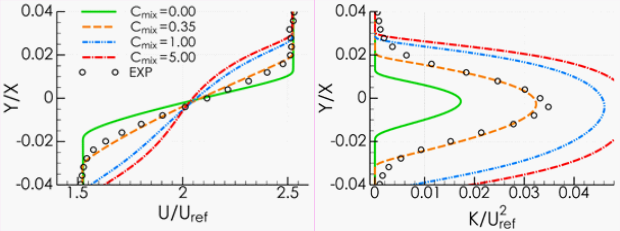
The figure below shows variations of  for a free mixing layer (
for a free mixing layer ( ) [18]. Increasing
) [18]. Increasing
 leads to increased turbulence levels and larger spreading
rates.
leads to increased turbulence levels and larger spreading
rates.
Figure 15.2: Impact of Changes in  on Free Mixing Layer. Left: Velocity Profiles, Right:
Turbulence Kinetic Energy Profiles
on Free Mixing Layer. Left: Velocity Profiles, Right:
Turbulence Kinetic Energy Profiles
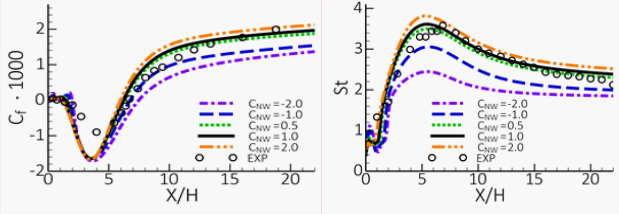
The impact of  is shown in the figure below for the reattachment region of a
backward-facing step [166]. Both the wall
shear stress coefficient
is shown in the figure below for the reattachment region of a
backward-facing step [166]. Both the wall
shear stress coefficient  and the Stanton number for heat transfer,
and the Stanton number for heat transfer,  , are strongly affected. Increasing
, are strongly affected. Increasing  leads to higher
leads to higher  and
and  numbers in this non-equilibrium region. In most cases, there
is no need to change
numbers in this non-equilibrium region. In most cases, there
is no need to change  from its default value.
from its default value.
Figure 15.3: Impact of Changes in  on Backward Facing Jet with Heat Transfer. Left: Wall
Shear Stress Coefficient,
on Backward Facing Jet with Heat Transfer. Left: Wall
Shear Stress Coefficient,  , Right: Wall Heat Transfer Coefficient,
, Right: Wall Heat Transfer Coefficient, 
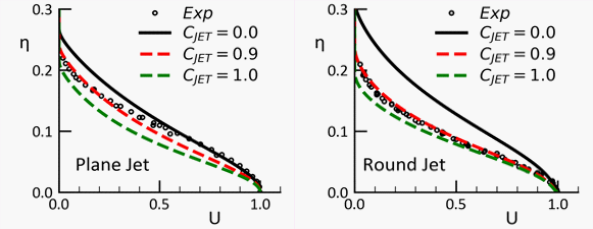
The figure below shows the influence of  for plane [23] and round
jet flows [174](
for plane [23] and round
jet flows [174]( =2,
=2,  =0.35,
=0.35,  =0.5). Increasing
=0.5). Increasing  (while
(while  is active) reduces the spreading rate for jet flows without
changing the spreading rate of mixing layers.
is active) reduces the spreading rate for jet flows without
changing the spreading rate of mixing layers.  is a sub-model of
is a sub-model of  and therefore loses its effectiveness in cases where
and therefore loses its effectiveness in cases where
 is reduced.
is reduced.

Note that the region where is active is defined by the blending function  . In regions where
. In regions where  =1 (near walls) there is no effect when changing
.
=1 (near walls) there is no effect when changing
.  can be visualized in Postprocessing. It can also be augmented
by the modification of expert parameters (see Generalized k-ω (GEKO) Model in the Fluent Theory Guide) or by
over-writing the function via a UDF (see DEFINE_KW_GEKO Coefficients and Blending Function in the Fluent Customization Manual).
can be visualized in Postprocessing. It can also be augmented
by the modification of expert parameters (see Generalized k-ω (GEKO) Model in the Fluent Theory Guide) or by
over-writing the function via a UDF (see DEFINE_KW_GEKO Coefficients and Blending Function in the Fluent Customization Manual).
The GEKO model (like all other -equation based models) uses a -insensitive wall treatment. For details on the available
options, see y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Fluent Theory Guide.
Reynolds Stress models (RSM) include several effects that are not easily
handled by Eddy-Viscosity models. The most important effect is the stabilization
of turbulence due to strong rotation and streamline curvature (as observed for
example, in cyclone flows). RSM on the other hand often demand a significant
increase in computing time partly due to the additional equations but mostly due
to reduced convergence. This additional effort is not always justified by
increased accuracy. Their usage is therefore not generally recommended and
should be restricted to flows for which their superiority has been established,
especially flow with strong swirl and rotation. If wall boundary layers are
important, the combination of RSM with the  - or BSL-equation is more accurate than the combination with
the
- or BSL-equation is more accurate than the combination with
the  -equation. The combination of RSM with BSL removes the
free-stream sensitivity observed with the
-equation. The combination of RSM with BSL removes the
free-stream sensitivity observed with the  -equation in the same way as for two-equation models.
-equation in the same way as for two-equation models.
Ansys Fluent also offers an algebraic Reynolds Stress Model (EARSM) which represents an extension of the standard two-equation models and is therefore a good compromise between capturing additional flow effects and computational costs.
The following four models for transition prediction are available in Ansys Fluent. Three of them can be combined with the scale-resolving methods described in Scale-Resolving Simulation (SRS) Models.
Transition SST model (also known as the
 -
- model)
model)This model can be combined with Scale-Adaptive Simulation, Detached Eddy Simulation, Stress-Blended Eddy Simulation, and Shielded Detached Eddy Simulation.
Intermittency Transition model (also known as the
 model)
model) It is available for BSL, SST, GEKO, Scale-Adaptive Simulation with BSL / SST / GEKO, Detached Eddy Simulation with BSL / SST / GEKO, Stress-Blended Eddy Simulation with BSL / SST / GEKO, and Shielded Detached Eddy Simulation with BSL / SST / GEKO.
Algebraic Intermittency Transition Model (also known as the Alg-
model) It is available for BSL, SST, GEKO, Scale-Adaptive Simulation with BSL / SST / GEKO, Detached Eddy Simulation with BSL / SST / GEKO, Stress-Blended Eddy Simulation with BSL / SST / GEKO, and Shielded Detached Eddy Simulation with BSL / SST / GEKO.
Transition
 -
- -
- model
model
For many test cases, the four models produce similar results. Due to their
combination with the SST model, the Transition SST model, the Intermittency
Transition model, and the Alg- model are recommended over the Transition  -
- -
- model. The Transition SST model is not Galilean invariant, and
should therefore not be applied to surfaces that move relative to the coordinate
system for which the velocity field is computed; furthermore, it is not suitable
for fully developed pipe / channel flows where no freestream is present. For
such cases, the Intermittency Transition model or the Alg- should be used instead (though you may need to adjust the
Intermittency Transition model for pipe / channel flows by modifying the
underlying correlations). Among the availble models, only the Intermittency
Transition model is capable of accounting for crossflow instability.
model. The Transition SST model is not Galilean invariant, and
should therefore not be applied to surfaces that move relative to the coordinate
system for which the velocity field is computed; furthermore, it is not suitable
for fully developed pipe / channel flows where no freestream is present. For
such cases, the Intermittency Transition model or the Alg- should be used instead (though you may need to adjust the
Intermittency Transition model for pipe / channel flows by modifying the
underlying correlations). Among the availble models, only the Intermittency
Transition model is capable of accounting for crossflow instability.
The first three models belong to the class of "Local-Correlation based Transition Models" (LCTM). They model the transitional processes through inclusion of transition correlations. The performance of the models is similar for the generic test cases used in their calibration. However, since laminar-turbulent transition is a complex and highly sensitive process, the models can produce different results for complex cases.
The Transition SST model (- model) solves two additional transport equations (in addition
to the underlying turbulence model). The Intermittency Transition model solves
only one additional transport equation and the Alg- model solves none. Avoiding additional transport equations
saves computational effort and was the main motivation for the development of
these models.
The Transition SST model is the most widely used model, especially in
Aeronautics, where it has become a standard RANS transition model in the last
decade. However, the Intermittency Transition model has also gained acceptance
due to its simpler formulation and its Galilean invariance. The
Alg- model is the latest addition and is less established. However,
it has also shown strength in industrial simulations where transition is often
defined by geometric features and/or laminar bubbles. This model is also
Galilean invariant and can be applied in any coordinate system. The optimal
choice depends on the application and it is recommended to run cases with all
three models and compare which model provides the best ratio of computational
cost versus accuracy.
The Transition -- model is not being actively developed but has also found
useful applications. Since it is only combined with the standard
k- model it is not recommended as the default model.
When using these models, note the following:
These models are only applicable to wall-bounded flows. Like all other engineering transition models, they are not applicable to transition in free shear flows. They will predict free shear flows as fully turbulent.
These models have not been calibrated in combination with other physical effects that affect the source terms of the turbulence model, such as:
buoyancy
multiphase turbulence
No special calibration has been performed for the combination of the Transition SST, Intermittency Transition, or Algebraic Transition models with scale-resolving methods.
Note that the activation of the LES term in the freestream in any hybrid RANS-LES model can affect the decay of the freestream turbulence, which in turn affects the transition location.
If you plan to include rough walls, it is recommended that you use the
- transition model (that is, the Transition SST
model).Proper mesh refinement and specification of inlet turbulence levels is crucial for accurate transition prediction.
Transition models are not recommended with tet/prism meshes.
In general, there is some additional effort required during the mesh generation phase because a low-Re mesh with sufficient streamwise resolution is needed to accurately resolve the transition region. The expansion factor in wall-normal direction should be below 1.15 to ensure sufficient resolution in the center of the boundary layer. Furthermore, in regions where laminar separation occurs, additional mesh refinement is necessary in order to properly capture the rapid transition due to the separation bubble.
The decay of turbulence from the inlet to the leading edge of the device should always be estimated before running a solution as this can have a large effect on the predicted transition location. Physically correct values for the turbulence intensity (Tu) should be achieved near the location of transition. This is consistent with physics, as transition is highly dependent on the freestream turbulence levels outside the boundary layer.
One weakness of the eddy-viscosity models is that these models are insensitive to streamline curvature and system rotations, which play an important role in many turbulent flow applications. To sensitize the standard eddy-viscosity models to these curvature effects, you can use a modified turbulence production term. For more information, see Curvature Correction for the Spalart-Allmaras and Two-Equation Models in the Fluent Theory Guide.
Eddy-viscosity models have a tendency to over-predict corner flow separation zones. A simplified quadratic non-linear algebraic extension for the Spalart-Allmaras and two-equation models based on the transport equation of the specific dissipation rate ω has been implemented that drives momentum into the corner and can thus reduce corner separation effects. For more information, see Corner Flow Correction in the Fluent Theory Guide.
A disadvantage of standard two-equation turbulence models is
the excessive generation of the turbulence energy,  , in the vicinity of stagnation points. In order
to avoid the buildup of turbulent kinetic energy in the stagnation
regions, the production term in the turbulence equations can be limited
by one of the two formulations described in Production Limiters for Two-Equation Models in the Fluent Theory Guide.
, in the vicinity of stagnation points. In order
to avoid the buildup of turbulent kinetic energy in the stagnation
regions, the production term in the turbulence equations can be limited
by one of the two formulations described in Production Limiters for Two-Equation Models in the Fluent Theory Guide.
There are many model enhancements available for turbulence models. While such enhancements can improve simulations in some cases, they can also have detrimental effects. The general recommendation is therefore to use them with caution.
As noted above, the use of low-Re terms in combination with
the  -equation is not generally recommended.
-equation is not generally recommended.
Another model enhancement that should be used with care is the compressibility effects of Sarkar ([136]). It can improve the prediction of free shear layers at high Mach numbers, but has also shown a pronounced negative impact on wall boundary layers. It is therefore not generally recommended. The compressibility effects option is available in the Viscous Model Dialog Box when the compressible form of the ideal gas law or the real-gas model is enabled. This option is disabled by default (though this was not the case in version 14.5 and earlier) and it is recommended that you keep this option disabled for cases not involving free shear flows.
Buoyancy has a pronounced effect on turbulence (Effects of Buoyancy on Turbulence in
the Theory Guide). The use of the source term in the  -equation is therefore recommended
for buoyancy affected flows. The source term in the
-equation is therefore recommended
for buoyancy affected flows. The source term in the  -equation and
-equation and  -equation is much less
established and the term should be enabled with care.
-equation is much less
established and the term should be enabled with care.
It is recommended that you use a  -insensitive wall treatment for all models for which it is
available (Spalart-Allmaras,
-insensitive wall treatment for all models for which it is
available (Spalart-Allmaras,  -equation and
-equation and  -equation). It provides the most consistent wall shear stress
and wall heat transfer predictions with the least sensitivity to
-equation). It provides the most consistent wall shear stress
and wall heat transfer predictions with the least sensitivity to  values. (See an Overview of the Spalart-Allmaras model, Enhanced Wall Treatment ε-Equation (EWT-ε), Menter-Lechner ε-Equation (ML-ε), and y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Theory Guide for more
information.)
values. (See an Overview of the Spalart-Allmaras model, Enhanced Wall Treatment ε-Equation (EWT-ε), Menter-Lechner ε-Equation (ML-ε), and y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Theory Guide for more
information.)
When Wall Functions are used, it is necessary to avoid grids with fine near
wall spacing. It is recommended that you use  in the entire domain. The application of Wall Functions is,
however, not generally recommended as they do not allow a systematic refinement
of the near wall grid. Wall Functions are especially damaging for flows at low
to medium Reynolds numbers (Re~
in the entire domain. The application of Wall Functions is,
however, not generally recommended as they do not allow a systematic refinement
of the near wall grid. Wall Functions are especially damaging for flows at low
to medium Reynolds numbers (Re~ -
- ), as the assumption of an extended logarithmic layer is not
valid in these cases. In case that Wall Functions are desired, the option of
Scalable Wall Functions (Scalable Wall Functions
in the Theory Guide) avoids
the grid restrictions and can be run on fine meshes.
), as the assumption of an extended logarithmic layer is not
valid in these cases. In case that Wall Functions are desired, the option of
Scalable Wall Functions (Scalable Wall Functions
in the Theory Guide) avoids
the grid restrictions and can be run on fine meshes.
Grid generation has a strong impact on model accuracy. There are many considerations that have to be followed when generating high quality CFD grids. From a turbulence modeling standpoint, the most important one is that the relevant shear layers should be covered by at least ~10 cells normal to the layer. Below this resolution, the model will not be able to provide its calibrated performance. Especially for free shear flows, whose location is not known during grid generation, this is a requirement that is hard to achieve. Nevertheless, you should be aware that for lower resolution, the model performance can degrade.
For wall bounded flows, a structured mesh in wall-normal direction is highly recommended. The structured portion of the mesh should cover the entire boundary layer and extend beyond the boundary layer thickness to avoid restricting the growth of the boundary layer. Advanced turbulence models for wall boundary layers like the Spalart-Allmaras model and the SST model will only provide improved results to other models if a minimum of 10 or more structured (hex or prism) cells are located inside the boundary layer. In addition, one should ensure that the prism layer covers the wall boundary layer entirely. Note that these are not specific requirements of these models, but are general requirements for wall boundary layer simulations.
Both ε-based and ω-based models offer  -insensitive wall treatment options (see Enhanced Wall Treatment ε-Equation (EWT-ε), Menter-Lechner ε-Equation (ML-ε), and y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Theory Guide for more
information), which make the models relatively insensitive to the
-insensitive wall treatment options (see Enhanced Wall Treatment ε-Equation (EWT-ε), Menter-Lechner ε-Equation (ML-ε), and y+-Insensitive Near-Wall Treatment for ω-based Turbulence Models in the Theory Guide for more
information), which make the models relatively insensitive to the
 -value of the wall cell. Generally speaking, it is more
important to ensure that the boundary layer is covered with sufficient cells,
then to achieve a certain
-value of the wall cell. Generally speaking, it is more
important to ensure that the boundary layer is covered with sufficient cells,
then to achieve a certain  criterion. However, for simulations with high accuracy demands
on the wall boundary layer (especially for heat transfer predictions), near-wall
meshes with
criterion. However, for simulations with high accuracy demands
on the wall boundary layer (especially for heat transfer predictions), near-wall
meshes with  ~1 are recommended. When wall functions are used, it is
essential to avoid meshes with
~1 are recommended. When wall functions are used, it is
essential to avoid meshes with  values lower than ~30 as the wall shear stress and the wall
heat transfer can and will seriously deteriorate under such conditions. For this
reason, the usage of
values lower than ~30 as the wall shear stress and the wall
heat transfer can and will seriously deteriorate under such conditions. For this
reason, the usage of  -insensitive wall treatments (to be selected for
-insensitive wall treatments (to be selected for
 -equation and default for
-equation and default for  -equation based models) is recommended.
-equation based models) is recommended.
For transition models (see k-kl-ω Transition Model, Transition SST Model, and Intermittency Transition Model in the Theory Guide), more stringent grid resolution
requirements apply than for standard RANS models, as transition modeling
requires the resolution of the thin laminar boundary layer upstream of the
transition location. For this reason, a low-Re mesh ( ) with sufficient streamwise resolution is needed to accurately
resolve the transition region. The expansion ratio of the grid normal to the
wall should not exceed 1.1. Furthermore, in regions where laminar separation
occurs, additional mesh refinement is necessary, in order to properly capture
the rapid transition due to the separation bubble. Finally, the decay of
turbulence from the inlet to the leading edge of the device should always be
estimated before running a solution as this can have a large effect on the
predicted transition location.
) with sufficient streamwise resolution is needed to accurately
resolve the transition region. The expansion ratio of the grid normal to the
wall should not exceed 1.1. Furthermore, in regions where laminar separation
occurs, additional mesh refinement is necessary, in order to properly capture
the rapid transition due to the separation bubble. Finally, the decay of
turbulence from the inlet to the leading edge of the device should always be
estimated before running a solution as this can have a large effect on the
predicted transition location.
The alternative to RANS models are models that resolve at least a portion of the turbulence for at least a portion of the flow domain. Such models are generally termed ‘Scale-Resolving’.
The most widely known SRS modeling concept is Large Eddy Simulation (LES). It is based on the approach of resolving large turbulent structures in space and time down to the grid limit everywhere in the flow. However, while widely used in the academic community, LES had very limited impact on industrial simulations. The reason lies in the excessively high resolution requirements for wall boundary layers. Near the wall, the largest scales in the turbulent spectrum are nevertheless geometrically very small and require a very fine grid and a small time step size. In addition, unlike RANS, the grid cannot only be refined in the wall normal direction, but also must resolve turbulence in the wall parallel plane. This can only be achieved for flows at very low Reynolds number and on very small geometric scales (the extent of the LES domain cannot be much larger than 10-100 times the boundary layer thickness parallel to the wall). For this reason the use of LES is only recommended for flows where wall boundary layers are not relevant and need not be resolved or for flows where the boundary layers are laminar due to the low Reynolds number. In such cases, the most balanced LES model is the WALE model (see Wall-Adapting Local Eddy-Viscosity (WALE) Model in the Theory Guide). It offers a good compromise between model complexity and generality. It also allows computing laminar shear (boundary) layers without any model impact.
An extension to LES is Wall-Modeled LES (WMLES). It allows the
LES computation of wall bounded flows at higher Reynolds number without
the large increase in grid resolution required for conventional LES
at high Reynolds numbers. For WMLES, the grid resolution is largely
independent of the Reynolds number with respect to the grid cells
required per boundary layer volume. An enhanced version of WMLES called
WMLES  -
- is also available. WMLES does not provide
zero eddy-viscosity for flows with constant shear. Therefore, it does
not allow the computation of transitional effects, and can produce
overly large eddy-viscosities in separating shear layers. The enhanced
WMLES
is also available. WMLES does not provide
zero eddy-viscosity for flows with constant shear. Therefore, it does
not allow the computation of transitional effects, and can produce
overly large eddy-viscosities in separating shear layers. The enhanced
WMLES  -
- formulation overcomes these deficiencies.
See Algebraic Wall-Modeled LES Model (WMLES) in the Theory Guide for further details.
formulation overcomes these deficiencies.
See Algebraic Wall-Modeled LES Model (WMLES) in the Theory Guide for further details.
In order to avoid the high resolution requirements of LES, numerous hybrid models have been developed in recent years. These are models that combine certain elements of RANS and LES approaches in a way that allows for the simulation of high Reynolds number flows. With hybrid models, the attached wall boundary layers are typically covered by the RANS part of the model, while large detached regions are handled in ‘LES’ mode, meaning with a partial resolution of the turbulent spectrum in space and time. Hybrid models rely on a strong enough flow instability to generate turbulent structures in the separated zone. This is typically the case for flows behind bluff bodies, where URANS models predict single-mode periodic vortex shedding. Hybrid models allow these vortices to generate smaller eddies down to the available grid limit. Figure 15.5: Illustration of SST-URANS vs. SST-SAS Models shows a typical scenario: While the application of a standard RANS model in unsteady mode results in a single frequency vortex shedding (left), the application of hybrid models allows a break-up of the large structures into smaller scales. This is beneficial for predicting the correct mixing behind the body or to extract spectral information (for example, for acoustic simulations). At the same time, the wall boundary layers are covered by the RANS part of the hybrid model avoiding the excessive resolution requirements of LES.
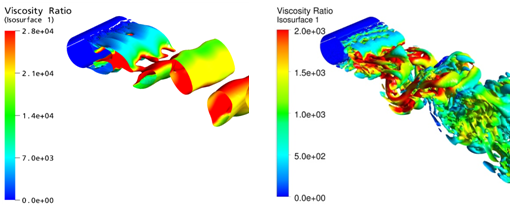
Figure 15.5: Illustration of SST-URANS vs. SST-SAS Models shows a circular
cylinder in a cross flow at  .
The left hand side illustrates the SST-URANS model, while the right-hand
side illustrates the SST-SAS model. The isosurface of
.
The left hand side illustrates the SST-URANS model, while the right-hand
side illustrates the SST-SAS model. The isosurface of  is colored according to the eddy viscosity ratio
is colored according to the eddy viscosity ratio  (note that the scale in the right-hand
side figure is smaller by a factor of 14).
(note that the scale in the right-hand
side figure is smaller by a factor of 14).
The SAS modeling approach (see Scale-Adaptive Simulation (SAS) Model in the Theory Guide) as proposed by Menter et al.
([100]
[101]) is based on the introduction of the
von Karman length scale,  , into the turbulence equations (for the BSL and SST
models, it enters into the
, into the turbulence equations (for the BSL and SST
models, it enters into the  -equation).
-equation).  is defined as the ratio of the first divided by the second
derivative of the velocity vector (times the von Karman constant
is defined as the ratio of the first divided by the second
derivative of the velocity vector (times the von Karman constant
 =0.41):
=0.41):
 | (15–1) |
The inclusion of this term allows the model to adjust its length scale to already resolved scales in the flow and thereby provide a low enough eddy viscosity to allow the model to operate in ‘LES’ mode.
The SAS approach has the advantage that the RANS part of the model is unaffected by the grid spacing and will therefore not allow a deterioration of model accuracy as seen in DES in regions of refined grid but insufficient flow instability. However, in cases where the flow instability is not strong enough, the SAS will remain in RANS mode and will not produce unsteady structures. While this is often a sign that the RANS model is still reasonably capable of handling the flow, it is a limitation if unsteady information is required (for example, in acoustics). In such cases, the internal interface option of the ELES implementation can be applied to convert modeled turbulence into resolved turbulence (see Internal Interface Without LES Zone in the Theory Guide).
The DES model (see Detached Eddy Simulation (DES) in the Theory Guide) achieves the switch between
RANS and LES by a comparison of the turbulent length scale  with the grid spacing
with the grid spacing  . The model selects the minimum of both and thereby
switches between RANS and LES mode by replacing
. The model selects the minimum of both and thereby
switches between RANS and LES mode by replacing  in the
in the  -equation by:
-equation by:
 | (15–2) |
Once the model selects the grid spacing as the minimum, the model is operating in ‘LES’ mode.
The grid spacing enters explicitly into the DES model. This can affect the
RANS solution in regions, where the grid is between RANS and LES resolution
(so-called ‘gray zones' in DES) and/or where the flow instability is
not strong enough to generate LES structures. Another issue to consider with
DES is the problem of ‘grid-induced-separation’ (GIS). It
occurs if the grid for an attached wall boundary layer flow is refined to a
point where the DES limiter becomes active and affects the RANS solution.
However, in such situations, the flow instability is not strong enough to
balance the reduced RANS content by resolved turbulence. This will typically
result in an artificial flow separation at the location of grid refinement.
It typically happens if  (
( being the boundary layer thickness). Remedies for this
situation have been proposed by Menter et al. who recommended using the F1
blending function of the SST-DES model to shield the boundary layers from
the DES limiter. Later, alternative blending functions for the same purpose
have been proposed by Spalart et al. ([154])—resulting in the terminology Delayed DES (DDES). The DDES model
as originally proposed for the Spalart-Allmaras model provided limited
protection against GIS for two-equation models such as BSL, SST, and
being the boundary layer thickness). Remedies for this
situation have been proposed by Menter et al. who recommended using the F1
blending function of the SST-DES model to shield the boundary layers from
the DES limiter. Later, alternative blending functions for the same purpose
have been proposed by Spalart et al. ([154])—resulting in the terminology Delayed DES (DDES). The DDES model
as originally proposed for the Spalart-Allmaras model provided limited
protection against GIS for two-equation models such as BSL, SST, and
 -
- . Therefore, the DDES function has been re-calibrated for
the BSL, SST, and
. Therefore, the DDES function has been re-calibrated for
the BSL, SST, and  -
- models and is now the recommended choice and the default
setting when using these models.
models and is now the recommended choice and the default
setting when using these models.
A further refinement is provided by the Improved DDES (IDDES) formulation of Strelets et al. ([143]), which extends the LES zone of the model to the outer part of wall boundary layers. This allows the simulation of wall boundary layers in Wall-Modeled LES (WMLES) mode. In this model, the IDDES model is applied like a LES model, typically with the specification of unsteady inlet conditions. The grid resolution requirements for WMLES are much less stringent than for LES.
All of the above shielding function variants are available in Ansys Fluent.
For the Spalart-Allmaras model, the original DDES shielding function is
used. For the  -
- , BSL, and SST models, the DDES function has been
re-calibrated for better boundary layer protection. The re-calibrated DDES
function is the default selection and is recommended over the use of the F1
or F2 functions for the BSL / SST model. Despite the potential difficulties
in the application of hybrid methods, they have the potential to greatly
expand the usage of Scale-Resolving Simulation models for engineering
applications, as they avoid the excessive resolution required by LES for
wall boundary layers. IDDES in WMLES mode is an advanced option and should
only be used if you are familiar with the original literature and the grid
requirements for this model.
, BSL, and SST models, the DDES function has been
re-calibrated for better boundary layer protection. The re-calibrated DDES
function is the default selection and is recommended over the use of the F1
or F2 functions for the BSL / SST model. Despite the potential difficulties
in the application of hybrid methods, they have the potential to greatly
expand the usage of Scale-Resolving Simulation models for engineering
applications, as they avoid the excessive resolution required by LES for
wall boundary layers. IDDES in WMLES mode is an advanced option and should
only be used if you are familiar with the original literature and the grid
requirements for this model.
The DES and DDES models in Ansys Fluent have been superseded by the SDES and SBES models described in Shielded Detached Eddy Simulation (SDES) and Stress-Blended Eddy Simulation (SBES).
The Shielded Detached Eddy Simulation (SDES) model and the Stress-Blended Eddy Simulation (SBES) model are hybrid RANS-LES models with an improved shielding function compared to DDES / IDDES. They provide strong shielding of the RANS boundary layer, faster “transition” from RANS to LES in separating shear layers, and (for SBES) explicit selection of the LES model. For implementation details, see Shielded Detached Eddy Simulation (SDES) and Stress-Blended Eddy Simulation (SBES) in the Theory Guide; for setup details, see Including the SDES or SBES Model with RANS Models.
These models are recommended over the older DES / DDES model formulations. The SBES model is considered the optimal selection, as it offers the clearest distinction between RANS and LES zones.
As pointed out in the previous sections, hybrid models rely on flow instabilities to generate turbulent structures in large separated regions without the explicit introduction of unsteadiness through the boundary conditions. However, there are situations, where such instabilities are not present or are not reliable to serve this purpose. In such cases, it is desirable to apply RANS and the LES models in predefined zones and provide clearly defined interfaces between them. At these interfaces, the modeled turbulent kinetic energy from the upstream RANS model is converted explicitly to resolved scales at an internal boundary to the LES zone. The LES zone can then be limited to the region of interest where unsteady results are required. ELES is available in Ansys Fluent and allows the combination of most RANS model with classical LES models. It is important to emphasize that in this mode, a full LES resolution is required within the LES zone. In the LES zone, using the WALE model is recommended (see Wall-Adapting Local Eddy-Viscosity (WALE) Model in the Theory Guide).
Grid Resolution SRS models are discussed in the following sections:
For wall boundary layers, it is important to distinguish if they are computed in RANS or wall-resolved or Wall-Modeled LES (WMLES) mode. Only the IDDES and the SBES model can be run in WMLES mode reliably.
In the case of RANS mode, the requirements are the same as for any RANS model.
For a wall-resolved LES, it is typically recommended to use a mesh with a grid
spacing scaling with  where x is the streamwise, y the wall normal and z the
spanwise direction (for example, channel flow). However, in complex
applications, the distinction between streamwise and spanwise direction is not
feasible and then
where x is the streamwise, y the wall normal and z the
spanwise direction (for example, channel flow). However, in complex
applications, the distinction between streamwise and spanwise direction is not
feasible and then  would be required. This scaling demonstrates the strong
Reynolds number dependency of the LES approach for wall bounded flows.
would be required. This scaling demonstrates the strong
Reynolds number dependency of the LES approach for wall bounded flows.
For the IDDES and SBES models in WMLES mode, the above requirements can be
relaxed. The grid spacing no longer scale with the wall friction, but with the
boundary layer thickness  . It is recommended that you use
. It is recommended that you use  . The wall normal resolution should be like for a finely
resolved RANS simulation, meaning a near wall resolution of
. The wall normal resolution should be like for a finely
resolved RANS simulation, meaning a near wall resolution of  and around 30 nodes inside the boundary layer.
and around 30 nodes inside the boundary layer.
Note that octree-based meshes (see Generating Rapid Octree Meshes) are close to being uniform in the streamwise, spanwise, and wall normal directions inside the boundary layer, and so are suitable for Wall-Function LES (WFLES). A minimum mesh resolution for boundary layers would be 5x5x5 cells per boundary layer volume.
For free shear flows, it is difficult to provide general recommendations, as there are many different flow scenarios. The current recommendation is therefore based on the most common (and most frequent) free shear flow – a turbulent mixing layer. It will not necessarily apply to other free shear flows like jets and you are advised to perform tests as to the optimal resolution of your specific flow.
For free shear flows and SRS models, one should aim for uniform isotropic cells (all edges have similar length). The shear layer should be covered by ~10-20 cells.
For Scale-Resolving Simulations (SRS), specific discretization and solver settings are required to achieve optimal accuracy with minimal numerical effort. The recommendations given below should be considered as a starting point for your specific flow application and are not generic, but problem dependent. The recommendations are based on incompressible, single phase flow without chemical reactions or other complex additional physics. In case your simulation features additional complex physical effects, it requires adjusting the recommended solver settings accordingly. In most cases, this will mean that a higher effort must be invested into the coupling of the equations (for example smaller time step size, reduced under-relaxation, higher iteration count, smaller residuals), in order to avoid a de-coupling of different physical phenomena.
For Scale-Resolving Simulations, optimal numerics settings are essential for achieving accurate results in an acceptable time frame. The reason is that at the SRS models operate at the resolution limit of the provided grid where the smallest scales are of the order of the grid spacing and the time resolution. Numerics settings therefore have to be chosen to provide an optimal balance between accuracy and robustness.
It is generally recommended to initialize the solution from a (reasonably) converged RANS simulation.
For Scale-Resolving Simulations, the resolution of the turbulent structures in time is essential for the success of the simulation. This is, to the largest extent, defined by the selected time step size. As the SRS model is operating at the grid limit, you should select a time step size that ensures a Courant-Friedrichs-Levy (CFL) number of
 | (15–3) |
The CFL number is computed by the solver and can be checked based on an initial RANS simulation, for example. It is important to emphasize that this is not a numerical limit and that the solver will be able to sustain much larger CFL numbers. In complex applications, there will always be limited regions of fine cells or large velocities and you should not restrict the CFL number based on such zones. The recommendation of CFL =1 should be applied in the main SRS region in combination with a uniform isotropic grid. It is recommended that you vary the time step size for each type of application and explore its optimal value. This can substantially save on computing costs.
The time derivative should be computed by the Second Order Implicit option. (See Inputs for Time-Dependent Problems for guidelines on setting solution parameters for transient calculations in general.)
For SRS models, it is important to minimize the numerical dissipation of the scheme in order to avoid damping of the smallest scales by numerical dissipation. For the pressure-based solver, the choice for spatial discretization is between the Central Differencing (CD) scheme (see Central-Differencing Scheme in the Theory Guide) and the Bounded Central Differencing scheme (BCD) (see Bounded Central Differencing Scheme in the Theory Guide); for the density-based solver, BCD is available with the Roe-FDS or AUSM flux type for the discretization of the flow equations, but CD is not. The Central Differencing scheme is the least dissipative and provides the highest resolution accuracy for the smallest scales. Especially for aero-acoustics simulations, where the spectral content at higher frequencies can be important, this is a desirable feature. However, Central Differencing schemes are prone to solution oscillations (checker boarding) in the velocity field. When using the Central Differencing scheme, it is therefore important to provide a high quality mesh (no mesh jumps, isotropic cells and high resolution in critical zones) and to avoid a large time step size (the CFL number should be smaller than 1 in the main SRS region). It is recommended that you visually monitor the solution regularly in order to avoid wasting computational resources. In case oscillations appear, the choice is to: improve the mesh; reduce the time step size; or to switch to the slightly more dissipative, but also more robust Bounded Central Differencing scheme. In many complex applications, the Bounded Central Differencing Scheme is the numerics option of choice. It typically provides sufficiently low dissipation to allow the turbulent structures to evolve, but, at the same time, is robust enough to handle non-optimal grids as they are typically encountered in industrial simulations. In addition, the Bounded Central Differencing scheme is also suitable for hybrid methods like SAS, DES, SDES, and SBES, and will provide stable solutions in RANS regions, with highly stretched grids and with a CFL number larger than 1. For ELES, the numerical scheme in the LES zone can be selected independently from the settings in the RANS zone. The RANS region can then be computed with standard higher-order upwind schemes and the LES zone can be covered by either the Central Differencing scheme or the Bounded Central Differencing scheme.
For the gradient calculation, it is recommended that you select the Least Squares Cell Based option, or the Green-Gauss Node Based option, to ensure a second-order interpolation on non-orthogonal grids.
For pressure interpolation, it is recommended that you use the second-order scheme, or the body-force-weighted scheme. Due to its higher dissipation, the PRESTO! scheme (see Pressure Interpolation Schemes in the Theory Guide) can result in a delayed formation or damping of turbulent structures. It is therefore not recommended for SRS.
The selection of the iterative scheme will mostly affect the computational costs as the cost per iteration between these methods is rather different. However, recommendations are not straightforward, as the higher cost per iteration of a scheme can be offset by faster convergence within the time step.
The fastest scheme is the Non-Iterative Time Advancement (NITA) scheme (see Non-Iterative Time-Advancement Scheme in the Theory Guide as well as Setting Solution Controls for the Non-Iterative Solver). This scheme typically works well for limited LES zones and high quality meshes. It is also important to use a small time step size that results in a CFL number below 1. For the NITA scheme, all explicit under-relaxation factors are, by default, set equal to one. With NITA, it has slight advantages to use the fractional step method if there is no involvement of more complex physics, when otherwise the PISO scheme can be more beneficial. Note that with the LES model, you can enable an accelerated time marching option, which enables a modified NITA scheme and other setting changes that can further speed up the simulation; for details, see Setting Solution Controls for the Non-Iterative Solver.
In case the application is too complex for the NITA scheme to provide a
solution, the iterative SIMPLEC (SIMPLE vs. SIMPLEC) or PISO (PISO) schemes are the next possible option.
They should be preferred relative to the SIMPLE scheme, as they show faster
convergence per time step and can be run with more aggressive under-relaxation
(higher values equal to 1 or close to 1). If such settings prevent convergence
within the time step, then check if your time step size is small enough for
maintaining CFL numbers below 1 in the SRS region – if not, then try
reducing  . If this is not possible, or does not lead to satisfactory
convergence, then reduce the under-relaxation factors to values between the
default settings and 1. For skewed meshes or meshes with problematic quality,
the reduction of explicit relaxation factor for pressure correction down to 0.7
from 1 can be very helpful.
. If this is not possible, or does not lead to satisfactory
convergence, then reduce the under-relaxation factors to values between the
default settings and 1. For skewed meshes or meshes with problematic quality,
the reduction of explicit relaxation factor for pressure correction down to 0.7
from 1 can be very helpful.
The convergence criterion within each time step will strongly affect solution costs, as a low criterion will result in an increased number of iterations. It is not possible to provide general recommendations, as the required residual depends on the application. The most relevant residual in the SRS models is the continuity residual. It should be converged by approximately 2 orders of magnitude per time step for a CFL number ~ 1. This should be achievable with around 5-10 maximum iterations per time step for flows involving no other physical models. Be sure to check the impact of convergence on your solution to ensure that the residual is reduced to a level consistent with your problem.
For simulations with small CFL values, the Extrapolate Variables option (available in the Run Calculation Task Page) can be very beneficial. This can substantially reduce the number of iterations within the time step up to 40% when the convergence control is based on the convergence criteria.
In case your simulation requires the combination of additional physical models, such as combustion or multiphase, a reduction of the under-relaxation factors might be required. In this case, the number of maximum iterations per time step can be increased to achieve the desired residual reduction.
For hybrid RANS/LES simulations, such as the SAS, DES, SDES, and SBES models, there can be situations where the RANS portion of the flow limits convergence (for example, due to poor grid quality). In such cases, the application of the coupled solver should be considered. For the coupled pressure-based solver, each iteration is typically more expensive than for the SIMPLEC algorithm, but this is at least partly offset by faster convergence. The recommendations concerning residuals are similar to the SIMPLEC method, but the maximal number of iterations can be reduced to values as low as 2-5 for highly unstable flows, and 5-10 for more sensible flows and acoustics simulations.
As discussed, turbulence modeling is a balance between accuracy and cost. The
recommendation is to use RANS models (such as the default - SST model) as much as possible and as long as they provide the
accuracy required for the simulation. RANS models will remain the workhorse of
turbulence modeling for many years to come. Within the RANS family, eddy-viscosity
models are typically sufficient for most engineering flow simulations. The
application of RSM is only recommended for flows that are known to systematically
benefit from their usage and justify the increase in computing power.
In cases where steady RANS or URANS models cannot provide the accuracy or unsteady information required, it is recommended that you switch to the SAS approach. It is relatively forgiving in terms of the grid resolution and will not deteriorate the results in case of insufficient resolution in the unsteady zone. The SAS model will only provide scale-resolution if a strong flow instability is present. Visual inspection (using isosurfaces of the Q criterion) will quickly allow a judgment if the model provides sufficient unsteadiness and resolution relative to the grid spacing. In such cases, the internal interface option of the ELES implementation can be applied to convert modeled turbulence into resolved turbulence (see Internal Interface Without LES Zone in the Theory Guide).
DDES (DES is not recommended) models can allow the formation of unsteadiness even for cases where SAS remains stable. DDES does require a more carefully crafted grid in the LES zone due to the DES grid influence on the RANS solution. For the DES-BSL / SST model, use the default DDES blending function for shielding.
SDES and SBES have an improved shielding function compared to DDES / IDDES. They provide strong shielding of the RANS boundary layer and demonstrate a fast “transition” between RANS and LES in separating shear layers. The SBES model formulation in combination with the WALE LES model is recommended over older models like DES, DDES, and IDDES.
ELES is recommended in cases where limited zones with high accuracy requirements are embedded inside a larger RANS zone. At the interface between the RANS and the LES zone, unsteady turbulence is generated either by the Vortex Method or the Spectral Synthesizer. For wall bounded flows, the ELES method requires a very fine near wall resolution in the LES zone.
Pure LES should only be applied to free shear flows (for example, combustion chambers without wall influence) or to very limited domains using meshes with fine LES near wall resolution. It is important to be aware of the strong increase of grid resolution requirements with Reynolds number for wall bounded flows. For wall boundary layers at higher Reynolds numbers, the IDDES model can be run in WMLES mode – meaning with specified unsteady inlet conditions.