


The following Rigid Dynamics command objects are available:
- Actuator
The actuator is the base class for all Loads, Body Loads, and Drivers.
ID table:
CS_Actuator- Members:
-
Condition All actuators can be conditional. See Condition to create this condition.
-
AppliedValue Measure that stores the evaluation of the actuator variable. Can be useful when the applied value depends on a measure other than time.
-
EnergyMeasure Measure that stores the energy generated by the actuator.
-
- Member Functions:
There are two ways to define the value of the load: using a variable, or by defining a table of input measures (in which case a variable is defined automatically).
-
SetVariable(variable) variableis a list of input measures in table form.-
SetInputMeasure(measure) measureis typically the time measure object, but other measures can be used as well. When using an expression to define a load variation, the measure must have only one component (it cannot be a vector measure). The variation can be defined by a constant, an expression, or a table.-
SetConstantValues(value) valueis a Python float constant. See Relation object for defining a constant.-
SetTable(table) tableis aCS_Table.-
SetFunc(string, is_degree) stringis similar to the expression used in the user interface to define a joint condition by a function. Note that the literal variable is always calledtime, even if you are using another measure as input.is_degreeis a boolean argument. If the expression uses trigonometric function, it specifies that the input variable should be expressed in degrees.
-
- Basis
A basis is a material frame moving with a body. Each coordinate system has a basis, but multiple coordinate systems can share the same basis.
ID table:
CS_Basis- Constructors:
CS_Basis()CS_Basis(Angle1, Angle2, Angle3)- Members:
- double [,]
Matrix Sets or gets function of the transformation matrix
- double [,]
- Body
A body corresponds to a Part in the geometry node of the Mechanical tree, or can be created by a command snippet. The preset
_bidvariable can be used to find a corresponding body.ID table:
CS_BodyExample:
MyBody = CS_Body.Find(_bid) print MyBody.Name
- Constructors:
CS_Body() CS_Body(Id) - Members:
-
Name Name of the body.
-
Origin Origin Coordinate System of the body. This Coordinate System is the moving coordinate system of one of the joints connected to the body. The choice of this joint, called parent joint, is the result of an optimization that minimizes the number of degrees of freedom of the system.
-
InertiaBodyCoordinateSystem Inertia body coordinate system of the body.
-
BodyType Type of body, values in
E_UnknownType,E_Ground,E_Rigid,E_CMS,E_General,E_Fictitious,E_RigidLeaf,E_RigidSubModel,E_PointMass,E_Beam
-
- Member Functions:
SetMassAndInertia(double mass, double Ixx, double Iyy, double Izz, double Ixy, double Iyz, double Ixz)Overwrites the mass and inertia values of a body.
SetCenterOfMassAndOrientationAngles(double Xg, double Yg, double Zg, double XYAngle, double YZAngle, double XZAngle) and SetCenterOfMassAndOrientationMatrix(double Xg, double Yg, double Zg, double mxx, double mxy, double mxz, double myx, double myy, double myz, double mzx, double mzy, double mzz)Overwrites the position of the center of mass and the orientation of the inertia coordinate system.
SetVariableMassAndPrincipalInertia(CS_Variable mass, CS_Variable Ixx, CS_Variable Iyy, CS_Variable Izz)Overwrites the constant mass and principal inertia properties by variable properties. During the solution process, the mass and inertia variation rate needs to be evaluated. Therefore, only Point Table, Polynomial and Function can be used to define the variation. Python user tables cannot be used to define kinetic properties variations. You can make some of the properties (mass, Ixx, Iyy and Izz) constants by using constant variables.
Note: The principal axis needs to be defined when the principal inertia is being assigned. If the body is created by a command,
SetCenterOfMassAndOrientationAnglesorSetCenterOfMassAndOrientationMatrixmust be called before callingSetVariableMassAndPrincipalInertia.This function only applies to rigid bodies.
Note: All quantities used in the solver must use a consistent unit system, which sometimes differs from the user interface unit system. For example if the user interface unit system is "mm,kg,N,s", the solver unit system will be “mm,t,N,s". When using
SetMassAndInertiaorSetVariableMassAndPrincipalInertia, the values of mass and inertia have to be entered using the solver unit system.- Derived Classes:
CS_FlexibleBody
- Body Coordinate System
The body coordinate system is used to connect a body to joints, hold the center of mass, or define a load. See Joint or Body to access existing coordinate systems. Coordinate systems can also be created.
ID table:
CS_BodyCoordinateSystem- Constructors:
CS_BodyCoordinateSystem(body, type, xyz, basis)- Members:
- Member Functions:
-
RotateArrayThroughTimeToLocal(MeasureValues) Rotates the transient values of a measure to a coordinate system.
MeasureValuesis a python two-dimensional array, such as that coming out ofFillValuesThroughTimeorFillDerivativesThroughTime. This function works for 3D vectors such as relative translation between two coordinate systems or 6-D vectors such as forces/moments.-
RotateArrayThroughTimeToGlobal(MeasureValues) Rotates the transient values of a measure from a coordinate system to the global coordinate system.
-
Type Type of coordinate system, values in
E_Unknown,E_Ground,E_Part,E_Joint,E_Inertia,E_BodyTransform,E_Contact,E_SplitJoint.
-
- Derived Classes:
None
Example:
forceInGlobal=joint.GetForce() valuesInGlobal=forceInGlobal.FillValuesThroughTime() for i in range(0,valuesInGlobal.GetLength(0)): print '{0:e} {1:e} {2:e} {3:e}'.format(valuesInGlobal[i,0], valuesInGlobal[i,1],valuesInGlobal[i,2],valuesInGlobal[i,3]) mobileCS=joint.MobileCoordinateSystem valuesInLocal=valuesInGlobal.Clone() mobileCS.RotateArrayThroughTimeToLocal(valuesInLocal) for i in range(0,valuesInGlobal.GetLength(0)): print '{0:e} {1:e} {2:e} {3:e}'.format(valuesInLocal[i,0], valuesInLocal[i,1],valuesInLocal[i,2],valuesInLocal[i,3])- Body Load
A body load is a load that is applied to all bodies in the system. Gravity or global acceleration are body loads.
The body load must implement a
GetAccelerationVectormethod. This vector is applied to the center of mass of each body. In order to maintain the energy balance of the system, the body load must also implement aComputeEnergymethod.Example: Acceleration varying with time
HalfTime = 1.0 HalfAmplitude = 10.0 Env=CS_Environment.GetDefault() Sys=Env.System (ret,found,time) = Sys.FindOrCreateInternalMeasure(CS_Measure.E_MeasureType.E_Time) class MyBodyLoad(CS_UserBodyLoad): def __init__(self): CS_UserBodyLoad.__init__(self) self.value = 0.0 def GetAccelerationVector(self,Mass,xyz,vel,bodyLoadForce): values = time.Values print 'MyBodyLoad::GetAccelerationVector' bodyLoadForce[0] = 0.0 bodyLoadForce[1] = 0.0 bodyLoadForce[2] = Mass*HalfAmplitude*math.sin(values[0]*3.14/(2.*HalfTime)) def ComputeEnergy(self,Mass,xyz,vel): print 'MBodyLoad::ComputeEnergy' return 0.0 load=MyBodyLoad() load.value = 10.0 Env=CS_Environment.GetDefault() Env.BodyLoads.Add(load)- CMSBody
A CMSBody represents a condensed part in the Mechanical tree.
- Constructors:
None.
- Members:
-
CondensedPartId (read only) The ID of the condensed part in the Mechanical tree.
-
PartIds (read only) The vector of the IDs of the Mechanical parts that are used in the condensed part.
-
- Member Functions:
None.
- Derived Classes:
None.
- Condition
Condition causes a load or a joint condition to be active only under defined circumstances. A condition is expressed in one of the following forms:
MeasureComponentoperatorthresholdLeftThreshold<MeasureComponent<RightThresholdLeftConditionoperatorRightCondition
For case 1:
MeasureComponentis a scalar Measure.Operatoris one of the following math operators:E_GreaterThanE_LessThanE_DoubleEqualE_ExactlyEqualThresholdis the threshold value.
Note: A condition cannot be shared between various actuators. For example, if two joint conditions must be deactivated at the same time, two conditions must be created.
Example:
DispCond = CS_Condition(CS_Condition.E_ConditionType.E_GreaterThan,DispX,0.1)
For case 2:
MeasureComponentis a scalar Measure.LeftThresholdandRightThresholdare the bounds within which the condition will be true.
Example:
RangeCond = CS_Condition(DispX,0.0,0.1)
For case 3:
LeftThresholdandRightThresholdare two conditions (case 1, 2 or 3).Operatoris one of the following boolean operators:E_OrE_And
Example:
BoolCond = CS_Condition(CS_Condition.E_ConditionType.E_Or, RangeCond, DispCond)
- Contact
A Contact corresponds to a contact pair between two bodies.
Corresponding ID table:
CS_ContactNote: If multiple contact objects have been defined between the same two bodies (with different surfaces), the solver merges them into one single pair. In that case, only one of the contact pairs exists and the call to
CS_Contact.Find(_cid)will fail for all contact objects other than the one that was used to handle the pair of bodies.- Constants:
None
- Members:
None
- Member Functions:
-
GetOutputContactForce() Retrieves a measure that contains the total contact force between the two linked bodies.
-
- ContactDebugMask
The ContactDebugMask object allows you to activate and customize the output of contact points. It can also be used to modify the default behaviour of contact. ContactDebugMask uses a set of switches that can be toggled on or off.
ID table:
CS_ContactDebugMask- Constants:
E_DEBUG_Flag.E_None, (*)E_DEBUG_Flag.E_Point1: point on the side 1 (contact) E_DEBUG_Flag.E_Point2: point on the side 2 (target) E_DEBUG_Flag.E_Normal: contact normal E_DEBUG_Flag.E_Normal1: normal on side 1 (Reference) E_DEBUG_Flag.E_Normal2: normal on side 2 (Target) E_DEBUG_Flag.E_Violation: contact violation (rd.n = P1P2.n) E_DEBUG_Flag.E_MaterialVelocity: material normal velocity (V2-V1).n (*)E_DEBUG_Flag.E_TotalVelocity: total normal velocity (material velocity + sliding velocity) E_DEBUG_Flag.E_EntityId1: geometric entity Id on side 1 (contact) E_DEBUG_Flag.E_EntityId2: geometric entity Id on side 2 (target) E_DEBUG_Flag.E_SurfaceId1: surface Id on side 1 (contact) E_DEBUG_Flag.E_SurfaceId2: surface Id on side 2 (target) (*)E_DEBUG_Flag.E_EntityType: type of geometric entities (vertex/edge/surface) (*)E_DEBUG_Flag.E_GeometricStatus: status of the contact position and velocity (touching,separated,...) E_DEBUG_Flag.E_Accepted: points that are finally kept E_DEBUG_Flag.E_InconsistentPoint: points not consistent with rank analysis E_DEBUG_Flag.E_ReceivedPoint: all points send by the contact E_DEBUG_Flag.E_DeletedPoint: points deleted during Geometric Filtering E_DEBUG_Flag.E_TrackedPoint: points successfully tracked E_DEBUG_Flag.E_TrackedPointFailure: points that failed for tracking E_DEBUG_Flag.E_NormalAngle: angle between normal (in degrees) E_DEBUG_Flag.E_SlidingVelocity1: sliding velocity on side 1 (contact) in global coordinates E_DEBUG_Flag.E_SlidingVelocity2: sliding velocity on side 2 (target) in global coordinates E_DEBUG_Flag.E_FailSafeFilteringMode: adjust contact radius to accept at least one point E_DEBUG_Flag.E_CheckIntegration: check consistency of integration between solver and contact E_DEBUG_Flag.E_RankAnalysis: result from rank analysis E_DEBUG_Flag.E_Transition: result from edge transitions analysis (*)E_DEBUG_Flag.E_NewTimeStep: at beginning of time step E_DEBUG_Flag.E_BeforeCorrection: before external loop of correction E_DEBUG_Flag.E_BeforeCorrectionPlus: before geometric correction E_DEBUG_Flag.E_All- Members:
None
- Member Functions:
-
SetOn(E_DEBUG_Flag flag) Enable output of contact points information specified by flag.
-
SetOff(E_DEBUG_Flag flag) Disable output of contact points information specified by flag.
-
Example:
CS_ContactDebugMask.SetOn(E_DEBUG_Flag.E_Accepted)
- ContactOptions
The ContactOptions object allows you to customize the behaviour of a contact server. ContactOptions uses a set of numerical values (real or integer) that can be get or set. When used as a switch, 0 means off and 1 is on.
- Constants:
None
- Members:
- TimeOut
Time in second (=30.0 by default)
- Verbose
Enable verbose mode in contact.out file (=0, disabled by default)
- NumberOfThreads
Number of parallel threads used for contact detection (=2 by default)
- Member Functions:
None
Example:
cOpts=CS_ContactOptions() cOpts.Verbose=1
- Driver
A driver is a position, velocity or acceleration, or translational or rotational joint condition. Drivers derive from the Actuator class.
Corresponding ID table:
CS_Actuator- Constants:
E_Acceleration,E_Position,E_Velocity- Members:
None
- Member Functions:
-
CS_Driver(CS_Joint joint, int[] components, E_MotionType driverMotionType) Creation of a joint driver, on joint
joint, degree of freedomcomponents, and with motion typedriverMotionType. Note that the same driver can prescribe more than one joint motion at the same time. This is useful if you want to add the same condition to all components of a prescribed motion for example. Components must be ordered, are zero based, and refer to the actual free degrees of freedom of the joint.
-
- Environment
This is the top level of the Rigid Dynamics model.
ID table:
CS_Environment- Members:
- System:
Corresponding system.
Example:
Env=CS_Environment.FindFirstNonNull() Sys = Env.System
- Ground:
Ground body.
Example:
Env = CS_Environment.FindFirstNonNull() Ground = Env.Ground
- Loads:
The vector of existing loads. This includes Springs that are considered by the solver as loads, as well as force and torque joint conditions.
Example:
Xdof = 0 Friction=CS_JointDOFLoad(PlanarJoint,Xdof) Env.Loads.Add(Friction)
- BodyLoads:
The vector of Body Loads.
Example:
MyBodyLoad = CS_BodyLoad() … Env.BodyLoads.Add(MyBodyLoad)
- Relations:
The vector of external constraint equations.
Example:
rel3=CS_Relation() rel3.MotionType=CS_Relation.E_MotionType.E_Velocity var30=CS_ConstantVariable() var30.SetConstantValues(System.Array[float]([0.])) var31=CS_ConstantVariable() var31.SetConstantValues(System.Array[float]([23.])) var32=CS_ConstantVariable() var32.SetConstantValues(System.Array[float]([37.])) var33=CS_ConstantVariable() var33.SetConstantValues(System.Array[float]([-60.+37.])) rel3.SetVariable(var30) rel3.AddTerm(jp,0,var31) rel3.AddTerm(js3,0,var32) rel3.AddTerm(jps,0,var33) Env.Relations.Add(rel3)
- Drivers:
The vector of Displacements, Velocity and Acceleration joint conditions.
- InitialConditions:
The vector of Displacements, Velocity, and Acceleration joint conditions to be used only at time=
0.- PotentialEnergy:
Gets the Potential Energy Measure.
- KineticEnergy:
Gets the Kinetic Energy Measure.
- TotalEnergy:
Gets the Total Energy Measure.
- ActuatorEnergy:
Gets the Actuator Energy Measure.
- RestartTime
Specifies the starting time in a restart analysis
- Member Functions:
-
FindFirstNonNull(): Returns the first environment in the global list. The table usually contains only one environment, thus it is a common way to access the current environment.
Example:
Env=CS_Environment.FindFirstNonNull()
-
AlterSimulationEndTime(endTime) Overwrites the end time of the simulation.
-
Solve() Solves the current analysis.
-
- Derived Classes:
None
- FlexibleBody
A Flexible Body is used by RBD for bodies that have flexible behavior, for instance a CMSBody.
- Constructors:
None.
- Members:
-
AlphaDamping Uses a variable to define the amount of alpha Rayleigh damping (proportional to the mass matrix) to be considered for the flexible body. The variable can be either dependent or constant.
Example:
aFlexibleBody.AlphaDamping=100
Or equivalently:
var=CS_Variable() var.SetConstantValues(System.Array[float]([100.])) aFlexibleBody.AlphaDamping=var
-
BetaDamping Uses a variable to define the amount of beta Rayleigh damping (proportional to the mass matrix) to be considered for the flexible body. The variable can be either dependent or constant.
Example:
Env=CS_Environment.GetDefault() Sys=Env.System array=System.Array.CreateInstance(float,4,2) array[0,0]=0.0 array[0,1]=5.e-6 array[1,0]=0.05 array[1,1]=5.e-6 array[2,0]=0.051 array[2,1]=1.e-4 array[3,0]=0.1 array[3,1]=1.e-4 table=CS_PointsTable(array) (err,found,time)=Sys.FindOrCreateInternalMeasure(CS_Measure.E_MeasureType.E_Time) var=CS_Variable() var.AddInputMeasure(time) var.SetTable(table) aFlexibleBody.BetaDamping = var
-
CMatrixScaleFactor Define a factor to be used to multiply the default damping matrix. For instance, with a CMSBody, this matrix can be created during the generation pass. When the damping matrix is generated for a Condensed Part (CMSBody), it will be automatically taken into account in the RBD use pass with a factor equal to 1.0.
-
- Member Functions:
-
SetModalDamping(iDof, variable) Define the amount of damping used for the degree of freedom specified by
iDof(index starts at 0). The variable can be either dependent or constant.-
GetModalDamping(iDof) Retrieve the damping variable defined for the degree of freedom
iDof(index starts at 0).-
SetLoadVectorScaleFactor(iLV, variable) Define a scale factor applied to the flexible body internal load specified by
iLV(index starts at 0). By default, the first load vector uses a constant scale factor equal to 1.0.-
GetLoadVectorScaleFactor(iLV, variable) Retrieve the variable associated to the factor specified by
iLV(index starts at 0).
-
- Derived Classes:
CS_CMSBody
- GILTable
A general multi-input interpolated table based on an unstructured cloud of points.
Corresponding ID table:
CS_GILTable- Member Functions:
-
CS_GILTable(sizeIn,sizeOut) Creates a GIL table with
sizeIninputs andsizeOutoutputs-
CS_GILTable(sizeIn, sizeOut, filename, scale, separator, noHeader) Creates a GIL table from a text file;
filenameis the name of the file containing the points (typically a .CSV file). This file must be in ASCII format, with one data point per row. Each row must containsizeIn+sizeOutcolumns. The columns must be separated by a character specified by the argumentseparator. The default value ofseparatoris,.scaleis an optional argument that scales all the output values. The default value, used if the optional argument is not specified, is 1.0.noHeaderis a boolean, optional argument that should betrueif there is no first row with labels.Example file:
Velocity, Deflection, Force 0.,0.,10.0 100.,0.,200.0 ...
-
AddInterpolationPoint(values) Adds an interpolation point to the General Interpolation Table.
valuesis a one dimensional array of sizesizeIn+sizeOut. The firstsizeInvalues in arrayvaluescorresponds to the values of the input variables. The followingsizeOutvalues in arrayvaluescorrespond to the output values.Example 5.1: Creation of a Nonlinear Stiffness Value That Depends on Spin Velocity (Omega) and on Deflection (dY)
VarForceY = CS_Variable(); # # Variable 0: spin VarForceY.AddInputMeasure(SpinMeasure ) # # Variable 1: Y displacement VarForceY.AddInputMeasure( TransY ) # # Create table with 2 input and 1 output EvalY = CS_GILTable(2,1) Omega = -1.0 dY = -1e-4 stiff = -9.0 values=System.Array.CreateInstance(float,3) values[0] = Omega values[1] = dY values[2] = stiff EvalY.AddInterpolationPoint( values ) Omega = 11.0 dY = -1e-4 stiff = -21.0 values[0] = Omega values[1] = dY values[2] = stiff EvalY.AddInterpolationPoint( values ) …
-
AddInterpolationPointArray(values) Adds a set of points to the General Interpolation Table.
valuesis a two dimensional array of size (numberOfPoints,sizeIn+sizeOut). On each row of the array, firstsizeInvalues in arrayvaluescorresponds to the values of the input variables. The followingsizeOutvalues in arrayvaluescorrespond to the output values. Each row contains a single interpolation point in the cloud of points.Example 5.2: Creation of a Nonlinear Force Value (F) That Depends on Deflection (dX)
ForceVariable = CS_Variable() ForceVariable.AddInputMeasure( TransX ) Evaluator = CS_GILTable( 1,1 ) values = System.Array.CreateInstance( float, 6, 2 ) dX = 0.0 F = 0.0 values[0,0] = dX values[0,1] = F dX = 10.0 F = 1.0 values[1,0] = dX values[1,1] = F dX = 30.0 F = 2.0 values[2,0] = dX values[2,1] = F dX = 60.0 F = 3.0 values[3,0] = dX values[3,1] = F dX = 90.0 F = 4.0 values[4,0] = dX values[4,1] = F dX = 130.0 F = 5.0 values[5,0] = dX values[5,1] = F Evaluator.AddInterpolationPointArray( values )
-
SetVerbosity(bVerbose) If
bVerboseis set to true, the GILTable will print the output value every time it is evaluated. This can be used for debugging purposes, but it will affect the performance if used on a table in a long simulation.
-
- Limitations:
These tables can only be used to apply forces and moments, not for other joint conditions or remote displacements.
- Joint
ID table:
CS_JointConstants: For the joint type (
E_JointType):E_2DSlotJoint,E_BushingJoint,E_CylindricalJoint,E_GeneralJoint,E_FixedJoint,E_FreeJoint,E_PlanarJoint,E_PointOnCurveJoint,E_RevoluteJoint,E_ScrewJoint,E_SingleRotationGeneralJoint,E_SlotJoint,E_SphericalJoint,E_TranslationalJoint,E_TwoRotationGeneralJoint,E_UniversalJoint,- Members:
-
Name Name of the joint
-
ReferenceCoordinateSystem Joint reference coordinate system
Example:
J1 = CS_Joint.Find(_jid) CSR = J1.ReferenceCoordinateSystem
-
MovingCoordinateSystem Joint moving coordinate system
Example:
J1 = CS_Joint.Find(_jid) CSM = J1. MovingCoordinateSystem
-
Type Joint type
-
IsRevert The internal representation of the joint can use flipped reference and mobile coordinate systems. In that case, all the joint results (for example, forces, moments, rotation, velocities and acceleration) must be multiplied by -1 to go from their internal representation to the user representation. As transient values of joint measures are giving the internal representation, use this
IsRevertinformation to know if results should be negated.-
AccelerationFromVelocitiesDerivatives When extracting joint degrees of freedom on joints that return true, accelerations should be done using the time derivatives of the joint velocity measure. On joints that return false, joint DOF derivatives should be extracted using the joint acceleration measure. It is important to check this flag first. Use of the wrong method to query joint acceleration can result in failure or incorrect results.
Example:
if Universal.AccelerationFromVelocitiesDerivatives: UniversalAccelerationValues=UniversalVelocityM.FillDerivativesThroughTime() else: UniversalAcceleration = Universal.GetAcceleration() UniversalAccelerationValues=UniversalAcceleration.FillValuesThroughTime()
-
Stops Returns the list of the stops defined on the joint.
-
- Member Functions:
-
GetVelocity() Returns the joint velocity measure. The size of this measure is the number of degrees of freedom of the joint. The derivatives of this measure give access to the joint accelerations.
-
GetRotation() Returns the joint rotation measure. The type of measure depends on the joint number of rotational degrees of freedom (
E_1DRotationMeasure,E_3DRotationMeasure,E_UniversalAngles). These rotations components are relative to the reference coordinate system of the joint.-
GetTranslation() Returns the joint translation measure. The length of this measure is the number of translational degrees of freedom of the joint. The translation components are expressed in the reference coordinate system of the joint.
-
GetForce() Returns the joint force measure. The length of this measure is always 6 (3 forces components, 3 torque component). This force measure is the total force/moment, including constraint forces/moment, external forces/moment applied to the joint, and joint internal forces/moment, such as elastic moment in a revolute joint that has a stiffness on the Z rotation axis. The force measure components are expressed in the global coordinate system. Note that the sign convention is different from the sign convention used in the Joint Probes in Mechanical.
-
GetAcceleration() Returns the joint acceleration measures on the joints that are constraint equations based. See the
AccelerationFromVelocitiesDerivativesmember to see when this function should be used.Example:
J1 = CS_Joint.Find(_jid) jointRotation = J1.GetRotation() jointVelocity = J1.GetVelocity() jointAcceleration = J1.GetAcceleration() jointForce = J1.GetForce()
-
SetFrictionVariable(var) Replaces the constant value already given to the friction coefficient with the expression given by
var.Example:
Joint = CS_Joint.Find(_jid) Var = CS_Variable() u0 = 0.1 u1 = 0.2 alpha = 0.5 Var.SetFunc('u0+u1exp(-alpha*time)',0) Var.AddInputMeasure(Joint.GetVelocity()) Joint.SetFrictionVariable(Var)The command has no effect if no value for the friction coefficient has been provided in the UI. For more information, see Joint Friction
-
SetFrictionTolerance(tol) Sets the friction tolerance.
Example:
Joint = CS_Joint.Find(_jid) Joint = Joint.SetFrictionTolerance(1e-4)
-
- Derived Classes:
On
SphericalJoint, SlotJoint, BushingJoint, FreeJoint, GeneralJoint.- Member Function
-
AddStop(angle_max, restitution_factor) Adds a spherical stop to a joint that has three rotations. A spherical stop constrains the motion of the X and Y rotational degrees of freedom, to give to the joint the behavior of a loose revolute joint, with a rotational gap. This will allow easier handling of over-constrained systems and building higher fidelity models without having to use contact.
-
angle_max The angle between the reference coordinate system Zr axis and the moving coordinate system Zm. Zr is the natural revolute axis.
-
restitution_factor The restitution factor, similar to other joint stops.
-

- On CylindricalJoint:
-
ReplaceByScrew(pitch) Creates a relation between the translational and the rotational degrees of freedom of a cylindrical joint.
Note:The pitch is in the current length unit. Any stop and/or lock defined on the original cylindrical joint is not transferred to the screw joint. Similarly, any constraint equation defined on the original cylindrical joint is not converted and so will prevent a proper solution.
The ReplaceByScrew command is deprecated. It is replaced by the Screw Joint provided in the Mechanical UI.
-
- On Bushing Joint:
-
GetBushingAngles() Returns the measure of the joint angles. This measure is used to compute the forces and torques developed in the joint. Note that this is only available for post-processing operations, as the measure does not exist before the solve has been performed.
-
-
- Creating New Joints:
The following joint can be created by commands:
CS_GeneralJoint(from, to, FreeX, FreeY, FreeZ, FreeRX, FreeRY, FreeRZ)Where
fromandtoare of typeCS_BodyCoordinateSystemandFree*are integers where 0 is no available motion and nonzero is available motion. Selecting two free rotations is not allowed.
- JointDOFLoad
JointDOFLoads are loads applied on a given degree of freedom of a joint. The load is applied in the joint reference coordinate system.
JointDOFLoad derives from Load.
- Constructor:
CS_JointDOFLoad(joint,dof)-
joint A joint object
-
dof An integer that defines the joint degree of freedom to be included in the term. The ordering of the degrees of freedom sets the translation degrees of freedom first. The degrees of freedom numbering is zero based. For example, in a slot joint, the translational degree of freedom is 0, while the third rotational degree of freedom is 3.
-
- Members:
None
- Member functions:
None
- Load
Loads derive from the Actuator class. They are derived from various types of loads, such as the
CS_JointDOFLoad.Corresponding ID table:
CS_Actuator- Members:
None
- Members Functions:
None
- Measure:
Most useful measures are pre-existing in the Rigid Dynamics model, and can be accessed using other object "get" functions. Additional measures can be created before solving for use in custom post-processing or as input values for joint conditions. For example, measures can be created to express conditions. In this case, the measure must be added to the system to be computed at each time step (see component measure example below).
ID table:
CS_MeasureConstants: For the measure type (
E_MeasureType):E_1DRotationJoint,E_3DRotationBody,E_3DRotationJoint,E_Acceleration,E_ActuatorStatus,E_ActuatorEnergy,E_AnsysJointForceAndTorque,E_AXPY,E_BodyAcceleration,E_BodyIntertialBCSQuaternion,E_BodyRotation,E_BodyTranslation,E_CenterOfGravity,E_Component,E_Constant,E_Contact,E_ContactForce,E_ContactVelocity,E_Counter,E_Displacement,E_Distance,E_DistanceDot,E_Divides,E_EigenValue,E_DOFSensitivity,E_Dot,E_ElasticEnergy,E_Energy,E_EulerAngles,E_ForceMagnitude,E_Forces,E_IntegratedOmega,E_JointAcceleration,E_JointDOFFrictionCone,E_JointDriverForce,E_JointForce,E_JointMBDVelocity,E_JointNormalForce,E_JointTranslation,E_JointRotation,E_JointVelocity,E_KineticEnergy,E_MassMomentsOfInertia,E_MeasureDotInDirectionOfLoad,E_Minus,E_Modulus,E_Multiplies,E_Norm,E_Omega,E_OmegaDot,E_OutputContactForce,E_Plus,E_PointOnCurveGeometryMeasure,E_PointOnCurveJointSigmaMeasure,E_PointToPointRotation,E_PointToPointRotationDot,E_Position,E_PotentialEnergy,E_RadialGap,E_ReferenceEnergy,E_RelativeAcceleration,E_RelativePosition,E_RelativeVelocity,E_RotationalRelativeDOF,E_RotationMatrix,E_SphericalStop,E_StopVelocity,E_StopStatus,E_Time,E_TimeStep,E_TranslationalJoint,E_UniversalAngles,E_UnknownType,E_User,E_Velocity,E_Violation,E_XYZAnsysRotationAngles,E_ZYXRotationAngles,E_AngularMomentum- Members:
- Length:
Number of components of the measure
Example:
nbValues = Measure.Length
- Type:
Measure type
- Calculation Method:
A measure can use direct calculation or be time integrated. On a measure that uses direct calculation, it is possible to retrieve the measure value through time. On a measure that is time-integrated, both values and time derivatives can be retrieved.
- Name:
Measure Name
- Member Functions:
-
FillValuesThroughTime() Returns a two dimensional array. This function is to be called after the solution has been performed. The first dimension of the returned array is the number of time values in the transient. The second dimension is the size of the measure plus one. The first column contains the time values, while the subsequent columns contain the corresponding measure values.
Example:
jointRotation = J1.GetRotation() jointVelocity = J1.GetVelocity() jointAcceleration = J1.GetAcceleration() jointForce = J1.GetForce() jointRotationValues =jointRotation.FillValuesThroughTime() jointVelocityValues =jointVelocity.FillValuesThroughTime() jointAccelerationValues =jointAcceleration.FillValuesThroughTime() jointForceValues =jointForce.FillValuesThroughTime() nbValues = jointRotationValues.GetLength(0) print jointRotation.Id print ' Time Rotation Velocity Acceleration' for i in range(0,nbValues): print jointRotationValues[i,0],jointRotationValues[i,1],jointVelocityValues[i,1],jointAccelerationValues[i,1] fich.close()-
FillDerivativesThroughTime() Returns a two dimensional array. This function is to be called after the solution has been performed. The first dimension of the returned array is the number of time values in the transient. The second dimension is the size of the measure plus one: the first column contains the time values, while the subsequent columns contain the corresponding measure derivatives. These derivatives are available on measures that are time integrated. To know if a measure is time integrated, use the
CalculationMethodmember.
-
- Derived Classes:
-
CS_JointVelocityMeasure Both translational and rotational joint velocities are expressed in the joint reference coordinate system. The number of components is the number of translational degrees of freedom plus the number of rotational degrees of freedom. For example, the size of the joint velocity measure for a revolute joint is 1. It contains the relative joint rotation velocity along the z axis of the joint reference coordinate system. The size of the measure for a slot joint is 4: one component for the relative translational velocity, and the 3 components of the relative rotational velocity. The joint velocity measure can be obtained from the joint using the
GetVelocityfunction. Rotational velocities are expressed in radians/second.-
CS_JointAccelerationMeasure Both translational and rotational joint accelerations are expressed in the joint reference coordinate system. The number of components is the number of translational degrees of freedom plus the number of rotational degrees of freedom. The joint acceleration measure can be obtained from the joint using the
GetAccelerationfunction.-
CS_JointRotationMeasure For revolute joints, cylindrical joints, or single rotation general joints, this measure has only one component: the relative angle between the reference and the moving coordinate system of the joint. Rotations are expressed in radians.
For slots, spherical joints, bushing joints, and 3 rotation vectors, this measure contains values that are not directly usable.
For universal joints, this measure contains the two joint axis rotational velocities. (The first one along the X axis of the reference coordinate system and the second along the Z axis of the moving coordinate system.) These angles are expressed in radians.
-
CS_JointTranslationMeasure This measure contains only the joint relative translations, expressed in the joint reference coordinate system. The joint translation measure can be obtained from the joint using the
GetTranslationfunction.-
CS_JointForceMeasure This measure contains the total forces and moment that develop in the joint. This includes constraint forces, elastic forces, and external forces. The joint velocity measure can be obtained from the joint using the
GetForcefunction.-
CS_PositionMeasure This measure allows for tracking of the position of a Body Coordinate System over time.
Example:
CoMBCS = OneBody.InertiaBodyCoordinateSystem Pos = CS_PositionMeasure(CoMBCS) Env=CS_Environment.FindFirstNonNull() Sys = Env.System Sys.AddMeasure(Pos)
-
CS_ComponentMeasure This measure allows the extraction of one component of an existing measure. This component can be expressed in a non default coordinate system. A component of -2 will compute the norm 2 of the vector of values of the measure.
Example:
Planar = CS_Joint.Find(_jid) Vel = Planar.GetVelocity() Xglobaldirection = 0 VelX = CS_ComponentMeasure(Vel,Xglobaldirection) Sys.AddMeasure(VelX)
-
CS_AXPYMeasure This measure allows a linear transformation from another measure with a scaling factor and an offset. This can be useful to transform an internal rotation measure that is expressed in radians to a measure in degrees used as an input to a load calculation, for example.
Example:
Revolute = CS_Joint.Find(_jid) Rot = Revolute.GetRotation() RotInDegrees = CS_AXPYMeasure( Rot, 180.0/math.pi, 0. ) Sys.AddMeasure(RotInDegrees)
-
CS_ModulusMeasure This measure allows you to compute the floating point remainder of value/modulus.
Example:
Revolute = CS_Joint.Find(_jid) Rot = Revolute.GetRotation() Rot02pi = CS_ModulusMeasure( Rot, 2.0*math.pi ) Sys.AddMeasure(Rot02pi)
-
CS_OutputContactForceMeasure This measure contains four 3D vectors:
Values 0 to 2 are the total contact force components between the two bodies, including the normal and tangential contributions.
Values 3 to 5 are the coordinates of the point where the interaction between the two bodies is reduced to a force; in other words, the total torque is zero.
Values 6 to 8 are the frictional force between the two bodies.
Values 9 to 11 are frictional moment components at the reduction point.
-
CS_AngularMomentumMeasure This measure computes the Angular Momentum of a list of bodies. Its value is a 3D vector.
Example:
FlyWheel= CS_Body.Find(_bid) FlyWheelAngularMomentumMeasure = CS_AngularMomentumMeasure() FlyWheelAngularMomentumMeasure.AddBody(FlyWheel) Sys.AddMeasure(FlyWheelAngularMomentumMeasure)
-
- MSolverDB
Solver database. The database is both the input and the results file to the solver. It can be used to solve outside the Mechanical session (for example, for co-simulation purposes) or to restart from a previous run.
- Members:
-
SetFileName(FileName) Set the database file name.
-
SetDirectoryName(DirectoryName) Set the database directory.
-
ReadDatabase() Read the content of the database.
-
WriteDatabase() Write the current database to a file.
-
DeleteDatabase() Delete the database.
-
CloseDatabase() Close the database file.
-
OpenDatabase() Open the database file and reads the database content table.
-
Dispose() Clear the content of the database and free memory used by the database.
-
- PointsTable
Corresponding ID table:
CS_PointsTable- Members Functions:
-
CS_PointsTable( tab ) tabis a two dimensional array where the first column contains the input values and the second column contains the corresponding output values.Example:
tab = System.Array.CreateInstance(float,6,2) tab[0,0]=-100. tab[1,0]=-8. tab[2,0]=-7.9 tab[3,0]= 7.9 tab[4,0]= 8. tab[5,0]= 100. tab[0,1]=1.0 tab[1,1]=1.0 tab[2,1]=0.1 tab[3,1]=0.1 tab[4,1]=1.0 tab[5,1]=1.0 Table = CS_PointsTable(tab);
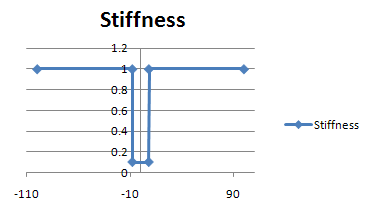
Here, the output (shown as Stiffness in the chart above) varies in a linear, piece-wise manner. For values of input less than -8.0 or greater than 8.0, the output is equal to 1.0. For values between -7.9 and +7.9, the output is 0.1. The transition is linear between -8.0 and -7.9, and as well between +7.9 and +8.0.
-
- PolynomialTable
Corresponding ID: CS_PolynomialTable
Create a polynomial relation between
sizeIninputs andsizeOutoutputs using the following function:Where i denotes the index of input and goes from 1 to n (
sizeIn), j denotes the index of output (from 1 tosizeOut).- Member Functions:
-
CS_PolynomialTable() Creates an empty polynomial table.
-
Initialize(constant) Specialized for 1x1 table. Initializes the table to be a 1 input, 1 output table, and sets the constant term (constant is a float value).
-
Initialize(sizeIn,sizeOut,constantValues) (generic version) Initializes the table with
sizeIninputs andsizeOutoutputs and sets the constant terms.sizeInandsizeOutare two integer values, andconstantValuesis an array ofsizeOutfloat values.-
AddTerm(coefficient,order) Specialized for 1x1 table. Adds one monomial term to the table. The coefficient is a float value and order is an integer value giving the power of the input.
-
AddTerm(coefficients,orders) (generic version) Adds one monomial term to the table. The coefficients are given by a
sizeOutfloat array and the power for each input by an array ofsizeInintegers.
-
- Relation
The relation object enables you to write constraint equations between degrees of freedom of the model. For example, two independent lines of shaft can be coupled using a relation between their rotational velocities.
If you have a gear coupling between two shafts where the second shaft rotates twice as fast as the first one, you can write the following equation:
2.0 X Ω1 + Ω2 = 0
where Ω1 and Ω2 are joint rotational velocities.
This relation contains two terms and a constant right hand side equal to zero.
The first term (2 X Ω1) can be described using the following information:
A joint selection
A joint degree of freedom selection
The nature of motion that is used in the equation (joint velocities, which is the most common case). For convenience, the nature of motion upon which the constraint equation is formulated is considered as being shared by all the terms in the relation.
This information defines Ω1
The factor 2.0 in the equation can be described by a constant variable, whose value is 2.0
ID table:
CS_Actuator
The coefficients of the relation can be constant or variable; however, the use of non-constant coefficients is limited to relations between velocities and relations between accelerations. If non-constant coefficients are used for relations between positions, the solution will not proceed.
- Constants:
E_Acceleration,E_Position,E_Velocity- Members:
None
- Member Functions:
-
SetRelationType(type) Type of relation, with type selected in the previous enumeration.
-
AddTerm(joint, dof, variable) Adds a term to the equation.
-
joint A joint object
-
dof An integer that defines the joint degree of freedom to be included in the term. The ordering of the degrees of freedom sets the translation degrees of freedom first, and that the degrees of freedom numbering is zero based. For example the translational degrees of freedom in a slot joint is
0, while the third rotational degree of freedom is3.-
variable A variable object
-
-
SetVariable(variable) Sets the right hand side of the relation. "variable" is a variable object.
-
- SolverOptions
The SolverOptions object allows you to customize the behaviour of the RBD solver. The option uses a group of numerical values (real or integer) that can be get or set. When used as a switch, 0 means off and 1 is on.
Corresponding ID table:
CS_SolverOptions- Constants:
None
- Member Functions:
-
VelocityToleranceFactor Multiplicative factor used to determine zero velocity tolerance (=100.0 by default);
-
ContactRadiusFactor Contact radius factor used in contact failsafe mode (=2.0 by default);
-
MaximumNumberOfCorrectionAttempts Number of external loops for geometric correction (=2 by default));
-
FrictionForShock Enable friction for shock solve (=0, disabled by default);
-
MaximumNumberOfDiagnostics Number of diagnostics messages given in Mechanical UI (=10 by default);
-
InactiveTouchingInDynamics Prevent inactive contact pair from being violated (=1, enabled by default);
-
DisablePolygonEvent Disable polygon event for contact (=0, active by default);
-
PrintDynamicSystem Print the dynamics system (=0 by default);
-
PurgeGST Purge GST file every n steps (=0, never by default);
-
PrintErrorEstimation Force output of error estimation (=0, disabled by default);
-
ExportXLSFileForCMS Export generalized coordinates for CMS bodies in a CSV file (=0, disabled by default)
-
HandlePOCTransitionsWithEnergyMinimization When point on curve joints are used, different solutions (depending on the topology) may be found when crossing curve connections. Furthermore, these solutions do not guarantee the conservation of the kinetic energy at the transition. To remedy this issue, this option makes the transitions using a method that minimizes the kinetic energy in a way similar to the assembly process using the inertia matrix. This solution works well for explicit time integration schemes, but it is not guaranteed for implicit ones. (=0, disabled by default)
-
- Example:
sOpts=CS_SolverOptions() sOpts.ExportXLSFileForCMS=1
- Spring
Corresponding ID table:
CS_Actuator- Members:
None
- Member Functions:
-
ToggleCompressionOnly() Calling this function on a translational spring will make the spring develop elastic forces only if its length is less than the spring free length. The free length has to be defined in the regular spring properties.
-
ToggleTensionOnly() Calling this function on a translational spring will make the spring develop elastic forces only if its length is greater than the free length of spring. The free length has to be defined in the regular spring properties.
-
SetLinearSpringProperties(system, stiffness, freeLength) Enables you to overwrite the stiffness and free length of a translational spring. This can be useful to parameterize these properties. For example, system is the system object, stiffness and free length are the double precision values of stiffness and free length.
-
SetNonLinearSpringProperties(table_id) Enables you to replace the constant stiffness of a spring with a table of ID
table_idthat gives the force as a function of the elongation of the spring. The table gives the relation between the force and the relative position of the two ends.-
GetDamper() The user interface has stiffness and damping properties of the spring. Internally, the Spring is made of two objects; a spring and a damper. This function enables you to access the internal damper using the Spring object in the GUI.
-
- Derived Classes:
None
- System
Corresponding ID table:
CS_System- Members:
-
Bodies Gets the list of bodies.
-
Joints Gets the list of joints.
-
- Member Functions:
-
AddBody(body) Adds a body to the system.
-
AddJoint(joint) Adds a joint to the system.
-
PrintTopology() Prints the topology of the systems (parent/child relation).
-
AddMeasure(measure) Adds a measure to the system, to be calculated during the simulation. This function must be called prior to solving so that the measure values through time can be retrieved.
-
(istat,found,measure)=FindOrCreateInternalMeasure( MeasureType) Extracts an existing global measure on the system. Supported measure types are: E_Energy, E_PotentialEnergy, E_ElasticEnergy, E_KineticEnergy, and E_Time.
-
- Derived Classes:
None
- Table
A table is the base class for Points Tables, Polynomial Tables, User Tables, and GIL Tables.
ID table:
CS_Table- Members:
None
- Member Functions:
-
Evaluate(In, Out) Allows evaluating a table in Python. In and Out are arrays of float, with sizes corresponding to the table input and output sizes. This function can be called from a user table for example.
-
Dispose() Explicit destruction of the table. This explicit destructor should be used only when the table hasn’t been assigned to an actuator. When the table is assigned to an actuator, the actuator is calling this destructor. Omitting to call this destructor can cause the evaluation of the results to fail.
-
- UserTable
A user table is a function with
iinput values andooutput values, with an evaluator that is defined in IronPython, allowing complex variation, or even evaluation performed outside the solver.Example:
LeftVarCoefX = CS_Variable(); # input 0,1,2 of the variable LeftVarCoefX.AddInputMeasure( LeftRelTrans ) # input 3 to 8 of the variable LeftVarCoefX.AddInputMeasure( LeftRelVelo ) class XForceTable(CS_UserTable): def __init__(self,sizeIn,sizeOut): CS_UserTable.__init__(self,sizeIn,sizeOut) def Evaluate(self,In,Out): TX = In[0] VX = In[3] Force = 1000.0*TX Out[0] = Force print 'ForceX = {0:e}'.format(Out[0]) return 0 LeftForceTableX = XForceTable( 9, 1 ) LeftVarCoefX.SetTable( LeftForceTableX )- Variable
A variable is an n-dimensional vector quantity that varies over time. It is used to define the variation of a load or a joint condition, or to express the coefficients in a relation between degrees of freedom. For convenience, the solver allows the creation of constant variables, where only the value of the constant has to be provided. More complex variables can be built using a function variable. A function variable is a function of input, where input is given by a measure and function is described by a table. In some cases, you are able to replace the table or the measure of an internal variable as used in a joint condition.
ID table:
CS_Variable- Members:
None
- Member Functions:
-
SetConstantValues(value) valueis an array, whose size is equal to the size of the table. To create a constant scalar variable, the value can be defined as shown in the following example:-
value = System.Array[float]([1.0]) System,Array, andfloatare part of the Python language. The result of this is an array of size one, containing the value 1.0.-
AddInputMeasure(measure) measureis a measure object. The same variable can have more than one measure. The input variable of the variable is formed by the values of the input measure in the order that they have been added to the list of input measures.-
SetTable(table) tableis a CS_PointsTable.-
SetFunc(string, is_degree) stringis similar to the expression used in the user interface to define a joint condition by a function. Note that the literal variable is always called "time", even if you are using another measure as input. "is_degree" is a boolean argument. If the expression uses a trigonometric function, it specifies that the input variable should be expressed in degrees.
Note: Variables cannot be shared by different actuators.
-
- Derived Classes:
ConstantVariable
