This joint type is only supported by the Rigid Dynamics solver.
- Constrained degrees of freedom:
UX, UY, ROTX, ROTY
UZ=pitch*ROTZ / 2*π (radians) = pitch*ROTZ/360 (degrees)
- Specific property:
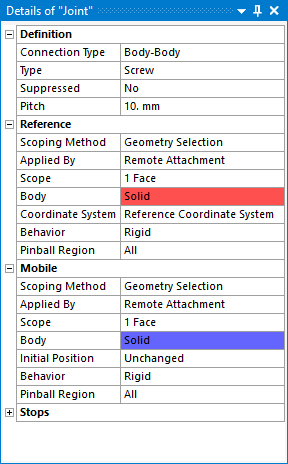
The pitch property in the details view allows you to define the screw pitch (in length unit) per turn. Negative values define a left-handed screw.
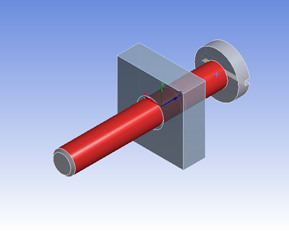
- Example: