


The Transform Picker is used to get the orientation and position of constraints, forces and various other entities that require a transformation matrix, by using geometry, marker, design frame and reference coordinates for repositioning. The Transform Picker has various functions to enable easy selection of the transformation matrix on the screen, as shown in the figure and table below.
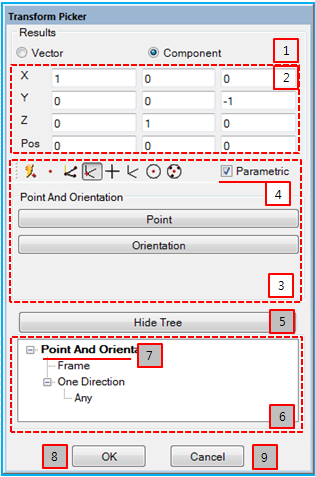
Figure 1.84: Description of Transform Picker properties
| Property | Description |
| 1. Result | Select either Vector or Component to determine the format for displaying direction and position. Refer to the Point Picker for more information. |
| 2. Orientation | Show the resultant directions and position, or to enter direction vectors and position vector for each component of the transformation matrix. |
| 3. Filter | Set a Filter for the Transform Picker. |
| 4. Parametric | Create a parametric relationship between the resultant directions and position, and the picking object. If the Parametric option is selected, the resultant directions and position will be transformed together when the picking object moves and rotates. The parametric option is only available for some filters, such as Three Points, Point and Orientation, Design Point and Frame. |
| 5. Hide Tree | Hide the history tree. |
| 6. History Tree | Show the picker history, which contains the filters used and the picked objects, and allows access to the filters in the history tree. This is useful when a picker has multi-step modeling depth and you change directions and position during those steps. |
| 7. Operation | Access filters and objects in multi-step modeling. |
| 8. OK/Parent | Return to the previous modeling step, applying the resultant directions and position. When on the first modeling step, this closes the transform picker. |
| 9. Cancel | Return to the previous modeling step without applying the resultant directions and position. When on the first the modeling, this closes the transform picker. |
The Transform Picker has various filters which allow selection of only a specific kind of object. The functionality of these filters is explained below.
Figure 1.85: Transform Picker filters
| Orientation Picker | Orientation Picker | Orientation Picker |
| Any |
 | A transformation matrix is determined automatically using one of the Cursor Location, Design Point, Design Frame, or Hole filters. |
| Cursor Location |
 | The position of the transformation matrix is determined from the current cursor position, and the orientation is determined to be the same as the inertia reference frame. |
| Three Points |
 | A transformation matrix is determined from the three selected points. The position is determined by the 1st point and the orientation is determined from the relative displacements. For more information about orientation and functionailty, see the Three Points filter for the Orientation Picker. |
|
Point and Orientation |
 | A transformation matrix is determined from the point and orientation selected using the Point Picker and Orientation Picker. |
| Design Point |
 | The position of the transform is determined by the selected Design Point, and the orientation is determined to be the same as the inertia reference frame. For more information about this function, see the Design Point filter for the point picker. |
| Frame |
 | A transformation matrix is determined by the selected Marker or Design Frame. For more information about this function, see the Frame filter for the point picker. |
| Hole |
 | A position of the transformation matrix is determined by the center point of the selected circle. The normal direction is also determined for the selected circle plane. The orientation is determined in the same way as for the One Direction filter of the Orientation Picker. |
| Three Points Hole |
 | The selected three points make a circle. The position of the transformation matrix is determined by the circle center point. The normal direction is also determined for the circle plane. The orientation is determined in the same way as for the One Direction filter of the Orientation Picker. |