


Dynamic Analysis can be used to calculate nonlinear dynamic behavior of a body and force while considering all non-linear effects such as material non-linearity, geometric non-linear effects or changes in boundary conditions due to dynamic events such as a contact and variable external loads. Inertia, damping, spring and constrained forces are considered in the equation of motion and the implicit integration method is used to integrate the variables in time domain as in the following equations.
 | (9–9) |
 | (9–10) |
 | (9–11) |
 | (9–12) |
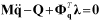
Where,  , for 0 ≤ n < 4.
, for 0 ≤ n < 4.
γ, β = Newmark's integration parameters
ρ∞ = spectral radius for infinite time step
n = numerical damping parameter (user input value)
The other variables are introduced in Initial Analysis and Static Analysis. Kinematics analysis is automatically carried out when the degree of freedom of the system is zero.
Figure 9.12: Relationship between n, γ and β
| n | ρ∞ | γ | β |
| 0.00 | 1.00 | 0.25 | 0.50 |
| 0.50 | 0.75 | 0.33 | 0.64 |
| 1.00 | 0.50 | 0.44 | 0.83 |
| 1.50 | 0.25 | 0.64 | 1.10 |
| 2.00 | 0.00 | 1.00 | 1.50 |
| 2.50 | –0.25 | 1.78 | 2.17 |
| 3.00 | –0.50 | 4.00 | 3.50 |
| 3.50 | –0.75 | 16.00 | 7.50 |
Remarks
From Equation 9–10, the Motion solver considers the kinematic constraints at the position level and the driving constraint in each user-specified level. The acceleration constraint is therefore not zero in some cases.
The Motion solver uses Accumulated angle to measure total rotated angle for the following entities.
Figure 9.14: Entities using the accumulated angle
Classification Entity Constraint Coupler with revolute joint Gear Rack and Pinion Screw Joint Constraints Revolute Joint Force Rotational Spring Sub-entity AX, AY and AZ in Function Expression AX, AY and AZ in SYSFNC RDISP in SYSARY The entities above cause a problem during solving when the rotating angle exceeds PI in one revolution time step. The Motion Solver shows a warning message in the message file during dynamic analysis when the rotation velocity * step size is bigger than PI. In this case, the wrong force or motion can be calculated. You must therefore set the maximum step size to a smaller value in order to avoid this problem. This situation only occurs when a body rotates at extremely high speeds.