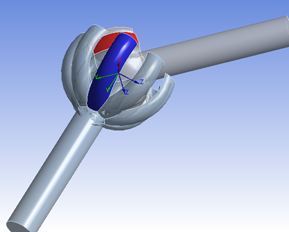
9.7.2.11. Constant Velocity Joint (Homokinetic Joint)
This joint type is only supported by the Rigid Dynamics solver.
The two shaft orientations are given by the y-axes on the reference and the mobile
sides.
- Constrained degrees of freedom:
UX, UY, UZ

- Example: