This joint type is only supported by the Rigid Body Dynamics solver.
The length of the joint is specified by the distance between the reference and mobile coordinates systems. Note that as the length must not be equal to zero, and the override option must be used so the reference and mobile are not coincident.
- Constrained degrees of freedom:
UX, UY, UZ, ROTX, ROTY, ROTZ are free. Only the distance between reference and mobile coordinates systems is constrained.
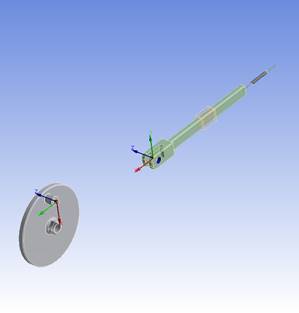
- Example: