


Many models require the simulation of rubber-like highly deformable materials. This is associated with the use of hyperelastic material models in the setup. The implicit solver makes a strong effort to solve these models with options like Large Deflection and Nonlinear Adaptivity, which are recommended when such materials are used. Nevertheless these solutions may not converge.
This would be a suitable situation in which to use explicit dynamics. You do need to specify all the input for the hyperelastic materials as opposed to the implicit solver, where the density and the incompressibility parameter can have zero values (see Materials), but the Explicit solver will provide a solution in most cases where the implicit solver cannot. Important things to look out for in the Explicit solver when using hyperelastic material models are the energy error/hourglassing and excessive mesh element distortion requiring the use of erosion. Models with high nonlinear deformations are also a good candidate for mass scaling. The following example demonstrates how the same setup works with the two different solvers. Figure 8.3: Comparison between the implicit (left) and the explicit (right) solvers for maximum deformation values shows the largest displacement achieved by the disc relative to a hyperelastic material complex part.
Figure 8.3: Comparison between the implicit (left) and the explicit (right) solvers for maximum deformation values
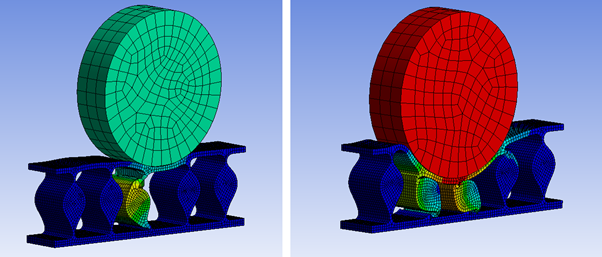
The implicit solver has trouble converging at around half of the total displacement but the explicit solver manages to complete the run, simulating the high deformations.