


The Time Transformation method handles the problem of unequal
pitch described above by transforming the time coordinates of the
rotor and stator in the circumferential direction in order to make
the models fully periodic in "transformed" time. Let
the  ,
,  , and
, and  coordinate
axis represent the radial, tangential (pitchwise) and axial directions
of the problem described in Figure 4.3: Phase Shifted Periodic Boundary Conditions.
coordinate
axis represent the radial, tangential (pitchwise) and axial directions
of the problem described in Figure 4.3: Phase Shifted Periodic Boundary Conditions.
Mathematically, the condition of enforcing the flow spatial periodic boundary conditions on both rotor and stator passages, respectively, is given by:
 | (4–1) |
 | (4–2) |
Alternatively, we can apply the following set of space-time transformations [217] to the problem above as:
 | (4–3) |
 | (4–4) |
 | (4–5) |
 | (4–6) |
where  .
.
The transformed set of equations now has regular spatial periodic boundary conditions as:
 | (4–7) |
 | (4–8) |
And the periodicity is maintained at any instant in time in the computational domain.
There are two important implications of working with the transformed system above instead of the conventional system:
The equations that are solved are in the computational (
 ,
,  ,
,  ,
,  ) transformed space-time domain and need to be transformed
back to physical (
) transformed space-time domain and need to be transformed
back to physical ( ,
,  ,
,  ,
,  ) domain
before postprocessing.
) domain
before postprocessing.The rotor and stator passages are marching at different time step sizes.
One way of understanding the difference in time step size stated in the second point is:
a) Each passage experiences a different period; that is, the stator period is:
 | (4–9) |
whereas the rotor period is:
 | (4–10) |
b) The period in each passage must be discretized using an identical
number of timesteps  . We can therefore write the rotor and stator periods as:
. We can therefore write the rotor and stator periods as:
 | (4–11) |
 | (4–12) |
where  and
and  represent
the time step size for the rotor and stator, respectively.
represent
the time step size for the rotor and stator, respectively.
c) Combining the two definitions of rotor and stator periods in a) and b) we have the time step sizes in the rotor and stator related by their pitch ratio as:
 | (4–13) |
The simulation time step size set for the run is used in the
stator passage(s)  and Ansys CFX computes
the respective rotor passage time step size
and Ansys CFX computes
the respective rotor passage time step size  based on the rotor-stator interface pitch ratio
as described above.
based on the rotor-stator interface pitch ratio
as described above.
When the solution is transformed back to physical time, the elapsed simulation time is considered the stator simulation time.
The flow interaction across the rotor-stator interfaces is handled by the pitch scaling machinery already present in the Profile Transformation method. However, while the Profile Transformation method results in a 1:1 pitch ratio with incorrect frequency due to profile contraction or expansion, the Time Transformation method has the correct frequency, as the time has been scaled proportionally.
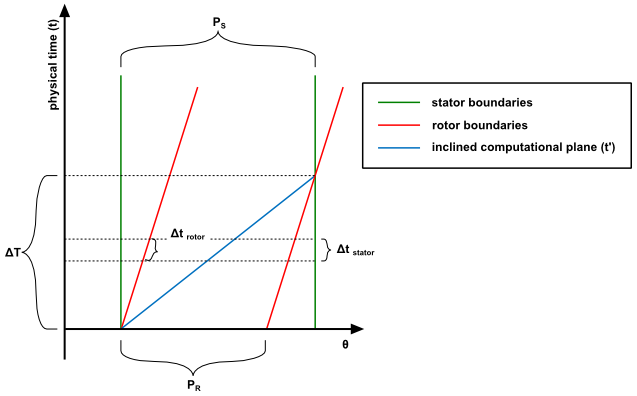
Another way of seeing the difference in time step sizes is to
look at the time vs. pitchwise direction plot for both stator and
rotor domains. In Figure 4.4: Rotor and stator periodic boundaries in space-time the
rotor domain periodic boundaries are plotted with reference to the
stator domain. One can notice that, even though the rotor pitch is
smaller than the stator pitch in physical space, their boundaries
match in the inclined computational space after time  . Furthermore, if we look at the time step
size of stator and rotor, we see that they are different and related
by the rotor-stator pitch ratio.
. Furthermore, if we look at the time step
size of stator and rotor, we see that they are different and related
by the rotor-stator pitch ratio.
For modeling information, see Time Transformation in the CFX-Solver Modeling Guide.