


The following methods are available for reporting velocities:
Cartesian velocities:
These velocities are based on the Cartesian coordinate system used by the geometry. To report Cartesian velocities, select X Velocity, Y Velocity, or Z Velocity. This is the most common type of velocity reported.
Cylindrical velocities:
These velocities are the axial, radial, and tangential components based on the following coordinate systems:
For axisymmetric problems, in which the rotation axis must be the
 axis, the
axis, the  direction is the axial direction and the
direction is the axial direction and the  direction is the radial direction. (If you model axisymmetric swirl, the swirl direction is the
tangential direction.)
direction is the radial direction. (If you model axisymmetric swirl, the swirl direction is the
tangential direction.)For 2D problems involving a single cell zone, the
 direction is the axial direction, and its origin is
specified in the Fluid Dialog Box.
direction is the axial direction, and its origin is
specified in the Fluid Dialog Box.For 3D problems involving a single cell zone, the coordinate system is defined by the rotation axis and origin specified in the Fluid Dialog Box.
For problems involving multiple zones (for example, multiple reference frames or sliding meshes), the coordinate system is defined by the rotation axis specified in the Fluid Dialog Box (or Solid Dialog Box) for the “reference zone”. The reference zone is chosen in the Reference Values Task Page, as described in Reference Values. Recall that for 2D problems, you will specify only the axis origin; the
 direction is always the axial direction.
direction is always the axial direction.
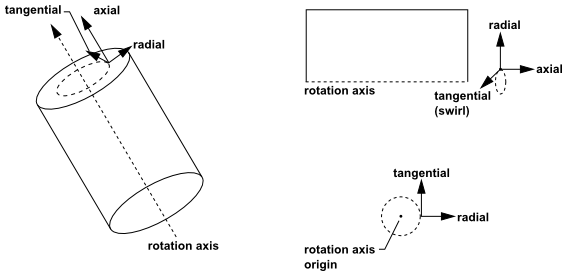
For all of the above definitions of the cylindrical coordinate system, positive radial velocities point radially out from the rotation axis, positive axial velocities are in the direction of the rotation axis vector, and positive tangential velocities are based on the right-hand rule using the positive rotation axis.
To report cylindrical velocities, select Axial Velocity, Radial Velocity, and so on. Figure 42.2: Cylindrical Velocity Components in 3D, 2D, and Axisymmetric Domains illustrates the cylindrical velocities available for different types of domains. For 3D problems, you can report axial, radial, and tangential velocities. For 2D problems, radial and tangential velocities are available. For axisymmetric problems, you can report axial and radial velocities, and, if you are modeling axisymmetric swirl, you can also report the swirl velocity (which is equivalent to the tangential velocity).
Relative velocities: These velocities are based on the coordinate system and motion of a moving reference frame. They are useful when you are modeling your flow using a moving reference frame, a mixing plane, multiple reference frames, or sliding meshes. (For example, see Modeling Flows with Moving Reference Frames for information about modeling flow in moving zones.) To report relative velocities, select Relative X Velocity, Relative Y Velocity, Relative Radial Velocity, and so on. (Note that you can report relative velocities for both Cartesian and cylindrical components.)
If you are using a single moving reference frame, the relative velocity values will be reported with respect to the moving frame. If you are using multiple reference frames, mixing planes, or sliding meshes, you will need to specify the frame to which you want the velocities to be relative by choosing the appropriate cell zone as the Reference Zone in the Reference Values Task Page (see Reference Values). The axis of rotation for each cell zone is defined in the associated Fluid Dialog Box or Solid Dialog Box. (See Specifying the Rotation Axis or Defining Zone Motion for details.)
Note that if your problem does not involve any moving zones, relative and absolute velocities will be equivalent.
Note that relative velocities can also be used to compute stagnation quantities (total pressure and total temperature), and that the cylindrical coordinate systems described in the second item above are used for defining the Axial Coordinate and Radial Coordinate as well.