


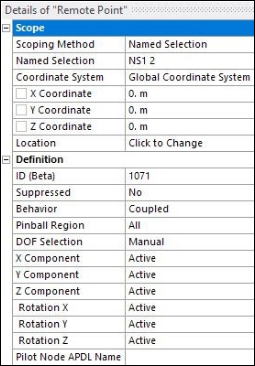
The boards of the PCB assembly are connected with five supporting columns. Remote Points with coupled behavior are used to scope Body-Body fixed joints and define contacts between the beams and boards. Eight remote points are defined (one for each of the three boards and five supports) with each remote point scoped to the relative contact points between the supports and the boards. The behavior property for each remote point is set to coupled as shown in Figure 20.4: Remote Point Details.
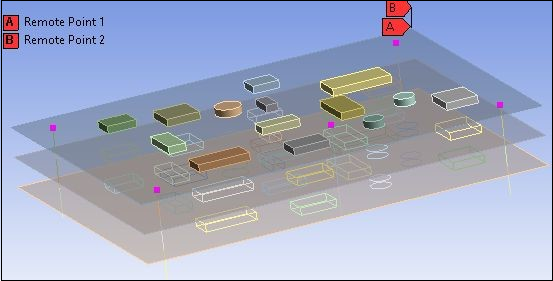
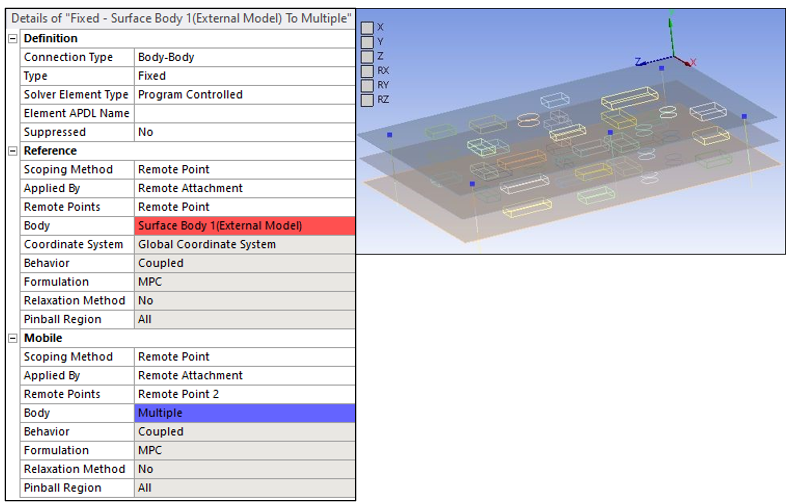
The contact between the beams and boards are defined as Body-Body fixed joints using Remote Points for the scoping mechanism as shown in Figure 20.5: Remote Points Used in a Single Joint and Figure 20.6: Fixed Joint Details and Graphic View.
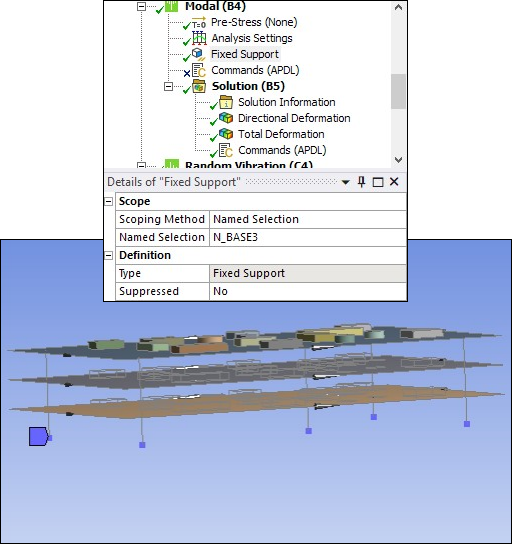
The base of the columns (y = -60) are constrained on all degrees of freedom as shown in the figure below:
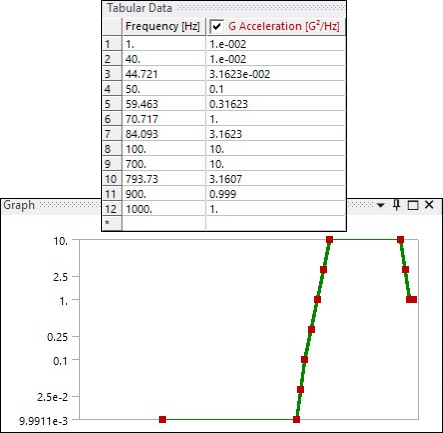
The PSD Gravitational Acceleration values for the input spectrum at different frequency points are shown in the figure below. The input segment between 1.0E-02 and 1.0E+01 has 5 intermediate points in order to obtain a good fit for the curve-fitting polynomial used in the PSD integration process.
A damping ratio of 5% is set for the Base Excitation.