


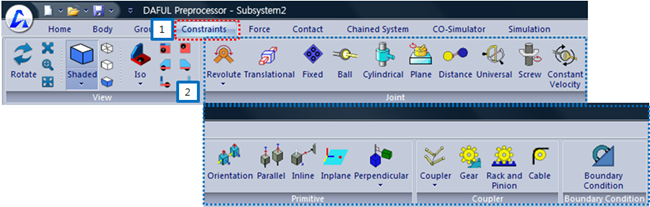
Figure 5.9: Steps to create a constraint entity
| Step | Operation |
| 1st step | Select on the ribbon menu as shown in the figure above. |
| 2nd step | Select one of the constraint entities as shown in the figure above. |
| 3rd step | Follow the prescribed creation steps for each constraint, as shown the table below. |
As shown in the table above, you can create a constraint entity by following several steps. The creation steps for each specific constraint entity are shown in the table below. For more information about the physical definition of each step, refer to the creation page for each constraint entity.
Figure 5.10: Creation methods for constraints
| Type | Creation Method |
| Revolute Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point |
| Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction (Default) | |
| Translational Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction |
| Fixed Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point |
| Ball Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point |
| Cylindrical Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction |
| Plane Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction |
| Distance Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Point |
| Universal Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction > Direction |
| Screw Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction |
| Constant Velocity Joint | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction > Direction > Direction |
| Orientation Primitive | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point |
| Parallel Primitive | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Point > Direction |
| Inline Primitive | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Point |
| Inplane Primitive | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction |
| Perpendicular Primitive | Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Direction > Direction (Default) |
| Body(Nodeset, Faceset) > Body(Nodeset, Faceset) > Point > Point > Direction > Direction | |
| Coupler | Joint > Joint (Default) |
| Joint > Joint > Joint | |
| Gear | Revolute Joint > Revolute Joint |
| Rack and Pinion | Translational Joint > Revolute Joint |
| Cable | Translational Joint > Translational Joint |
| PTCV | Curveset > Body > Point |
| CVCV | Curveset > Curveset |
| Boundary Condition | Marker > Nodeset |