


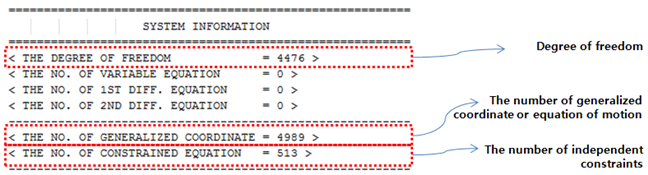
Degree of Freedom (DOF) is a numerical representation of how bodies can move relative to one another in a system. It may vary independently. A free body in space has six DOFs. When you add a constraint, such as a revolute joint, between two bodies, the constraint will remove DOFs from the system. For example, a revolute joint removes three translational DOFs and two rotational DOFs between two bodies. The total number of DOFs in the system is equal to the difference between the number of allowed body motions and the number of active constraints in the model. The information is displayed in the Motion Solver message file (*.msg) as shown in the figure below.
The number of constraints for each Joint is as shown in the table below. For a Boundary Condition, the number of constraints is determined by user input.
Figure 5.7: The number of constraints for each joints
| Type | The number of constrained DOFs | ||
| Translational | Rotational | Coupled | |
| Revolute Joint | 3 | 2 | 0 |
| Translational Joint | 2 | 3 | 0 |
| Fixed Joint | 3 | 3 | 0 |
| Ball Joint | 3 | 0 | 0 |
| Cylindrical Joint | 2 | 2 | 0 |
| Plane Joint | 1 | 2 | 0 |
| Distance Joint | 1 | 0 | 0 |
| Universal Joint | 3 | 1 | 0 |
| Screw Joint | 2 | 2 | 1 |
| Constant Velocity Joint | 3 | 1 | 1 |
| Orientation Primitive | 0 | 3 | 0 |
| Parallel Primitive | 0 | 2 | 0 |
| Inline Primitive | 1 | 0 | 0 |
| Inplane Primitive | 2 | 0 | 0 |
| Perpendicular Primitive | 0 | 1 | 0 |
| Coupler | 0 | 0 | 1 |
| Gear | 0 | 0 | 1 |
| Rack and Pinion | 0 | 0 | 1 |
| Cable | 0 | 0 | 1 |
| PTCV | 2 | 0 | 0 |
| CVCV | 2 | 1 | 0 |
| Boundary Condition | User | User | 0 |