


From the Kinematic Request property dialog, parameters can be modified as shown in the figure and table below.
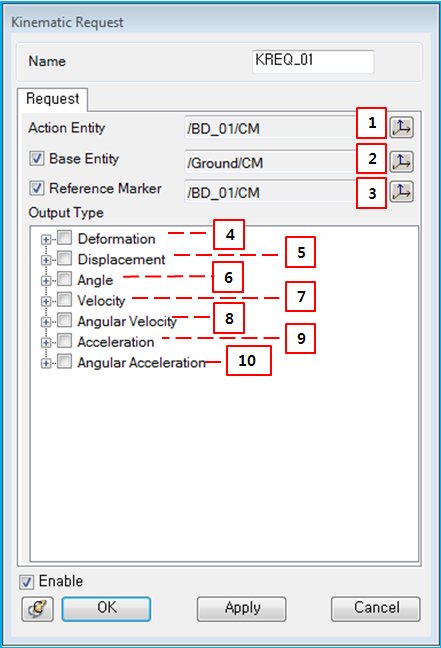
Figure 9.68: Description of parameters in the Kinematic Request properties dialog
| Parameter | Symbol | Description | Dimension |
| 1. Action Entity | N/A | Use to set a faceset or marker as the action entity by General Picker. When the faceset is selected as the action entity, the center position of nodes on the faceset is defined as the position of the action entity. | N/A |
| 2. Base Entity | N/A | Use to set a faceset or marker as the base entity by General Picker. When the faceset is selected as the base entity, the center position of nodes on the faceset is defined as the position of the base entity. When this entity is not defined, the inertia reference frame is internally defined. | N/A |
| 3. Reference Marker | N/A | Use to set a marker as the reference by General Picker. The resultant vector will be transformed into the orientation matrix of the reference marker. When this entity is not defined, the inertia reference frame is internally defined. | N/A |
| 4. Deformation |
 | Use to output the translational deformation between the action and base entities. The deformation is measured in the user defined reference frame. | Length |
| 5. Displacement |
 | Use to output the relative displacement of the action entity with respect to the base entity in the reference frame. | Length |
| 6. Angle |
 | Use to output the relative angle of the action entity with respect to the base entity. The angle can be represented as the Euler angles of ZXZ (PSI-THETA-PHI) and ZYX (YAW-PITCH-ROLL). The reference marker is not available. | Radian |
| 7. Velocity |
 | Use to output the relative velocity of the action entity with respect to the base entity in the reference frame. | Length/Time |
| 8. Angular Velocity |
 | Use to output the relative angular velocity of the action entity with respect to the base entity in the reference frame. | Radian/Time |
| 9. Acceleration |
 | Use to output the relative acceleration of the action entity with respect to the base entity in the reference frame. | Length/Time^2 |
| 10. Angular Acceleration |
 | Use to output the relative angular acceleration of the action entity with respect to the base entity in the reference frame. | Radian/Time^2 |