


As shown in the figure below, the Error tolerance, Numerical damping, and several other parameters for the simulation can be defined in the Dynamic tab of simulation configuration dialog. The parameters are described in the table below.
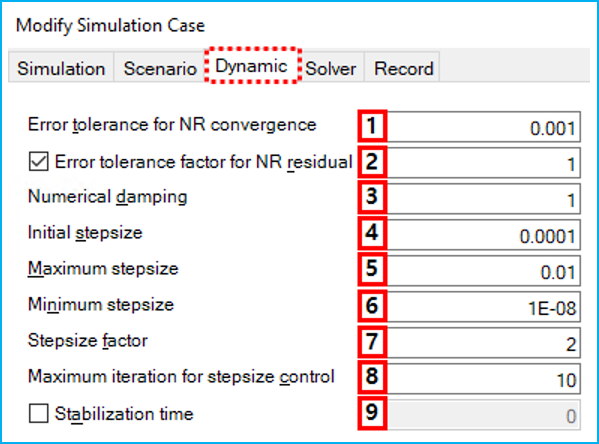
Figure 9.22: Dynamic parameters in the simulation configuration
| Feature | Description | Dimension (Range) |
| 1. Error tolerance for NR convergence | Use to set the error tolerance to check for convergence of the nonlinear equation solver. If the norm of the unknown variables in the solver is less than this value, the solver will stop the NR iteration. If the Error tolerance factor for NR residual option is selected, the solver will also stop the NR iteration when that condition is satisfied. |
N/A (Real>0.0) |
| 2. Error tolerance factor for NR residual |
Use to set the error tolerance factor to check for convergence of the nonlinear equation solver. If the residual norm of the equation of motion in the solver is less than the Error tolerance for NR convergence multiplied by this value, the solver will stop the NR iteration. It may be helpful to clear this option if the number of NR failures is greater than number of integration failures. |
N/A (Real>0.0) |
| 3. Numerical damping | Use to set the numerical damping. This value will determine the integrator coefficients in Equation 9–11 and Equation 9–12. This value should not exceed 1. Refer to the verification manual for a study on this value. |
N/A (0≤Real<4) |
| 4. Initial step size |
Use to set an initial integration step size. At the start of the dynamics analysis, the next time interval will be determined with this value as follows.

where |
Time (Real>0.0) |
| 5. Maximum step size | Use to set the maximum integration step size. The step size of the integrator is limited to this value. |
Time (Real>0.0) |
| 6. Minimum step size | Use to set the minimum integration step size. The step size of the integrator can't be less than this value. If the step size is less than this value, the solver will be terminated with an error message. |
Time (Real>0.0) |
| 7. Stepsize factor |
Use to set a factor for increasing and decreasing integration step size as follows.

where |
N/A (Real≥1.0) |
| 8. Maximum iteration… | Use to set the maximum number of integration steps under the same integration step size. If the same step size is maintained for more than this number of steps, the integration step size will be increased. |
N/A (Integer>0) |
| 9. Stabilization time | Use to reach the initial state of the body assembly quickly, up to the assigned time. Note that during stabilization time, it is meaningless to evaluate analysis results. | (Real>0.0) |


