Overconstrained conditions can occur when more constraints than are necessary are applied to a joint's degrees of freedom. These conditions may arise when rigid bodies are joined together using multiple joints. The overconstraints could be due to redundant joints performing the same function, or contradictory motion resulting from improper use of joints connecting different bodies.
For the Transient Structural analysis type, when a model is overconstrained, nonconvergence of the solution most often occurs, and in some cases, overconstrained models can yield incorrect results.
For the Rigid Dynamics analysis type, when a model is overconstrained, force calculation cannot be done properly.
The following features exist within Mechanical that can assist you in detecting possible overconstrained conditions:
Use the Joint DOF Checker for detecting overconstrained conditions before solving (highlight the Connections object and select the Worksheet option on the Context tab). In the following example, the original display of the Joint DOF Checker warns that the model may be overconstrained.
After modifying the joint definitions, display the Joint DOF Checker again, which shows that the overconstrained condition has been resolved.
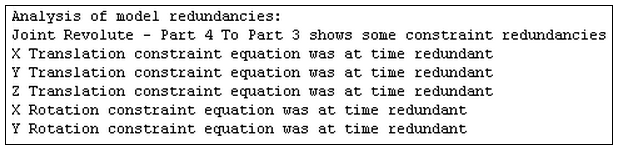
After solution, you can highlight the Solution Information object, then scroll to the end of its content to view any information that may have been detected on model redundancies that caused overconstrained conditions. An example is presented below.