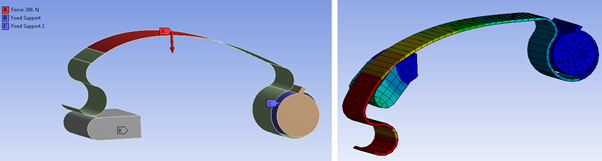
A common analysis in the quasi-static range is the simulation of physical mechanisms. This means that rigid body movements are included in the analysis. A common simulation is a rigid or much stiffer body that snaps over a soft and flexible one. Some examples include: rubber seals for waterproofing, snapping of softer metal elements to ensure a tight fit or snapping through a notch to prevent backward movement. In these situations the implicit solver can encounter problems modeling the high deformations right before the snap, or the release of the high deformations after the snap. These problems are inherently unstable for the implicit solver and can be a challenge to solve successfully. Figure 8.6: The Clip Model Setup in the Implicit Solver with Final Deformation Values (right) shows an example of a clip snap through model where a metal clip has to pass over a rubber step.
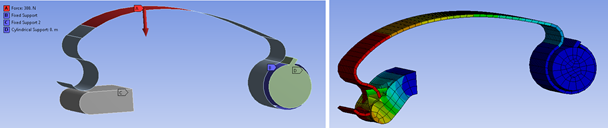
The solution does not converge unless the mesh is much coarser - this means the initial clip to rubber step contact is missed (without any special settings). Also there is a problem of missed contact between the clip and the hinge, which you can solve in the implicit solver by applying a cylindrical support. This same model with the same setup for boundary conditions and less constraints (no cylindrical support or equivalent), can be successfully solved by the explicit solver, as seen in Figure 8.7: The Clip Model Setup in Explicit Dynamics with Final Deformation Values (right). The setup uses mostly default settings apart from a Static Damping value which is added because of the hyperelastic material (see Damping ). The model will run successfully without damping, but due to the nature of the materials, strong oscillations will be introduced. This means the maximum stress on the clip will spike at a much larger value than in the damped solution and then gradually converge on a similar final value when the vibrations decrease.