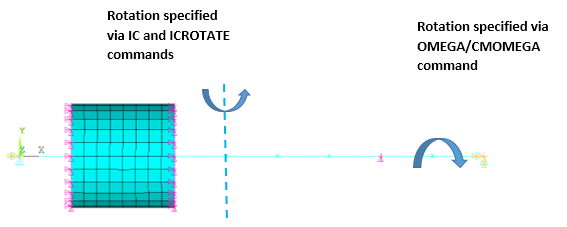
The following example shows a quasi-static analysis of a two rotor system. In this analysis, the gyroscopic forces are included as a load vector. They are calculated from the gyroscopic matrix, generated from the rotational velocity input (OMEGA and CMOMEGA) and the activation of the CORIOLIS command, and from the instantaneous velocities, specified using IC and ICROTATE commands.
The structure is a two rotor system on symmetric bearings as shown in Figure 7.36: Multi-Rotor System. The rotors, meshed using beam elements, are rotating at 1000 RPM and 2000 RPM respectively about its axis (global X-direction). The stator is meshed using shell elements. Parts are assembled using constraint equations (CERIG and RBE3). The whole structure is also rotating in a direction perpendicular to the shaft axis (global Z-direction), specified using the ICROTATE command.
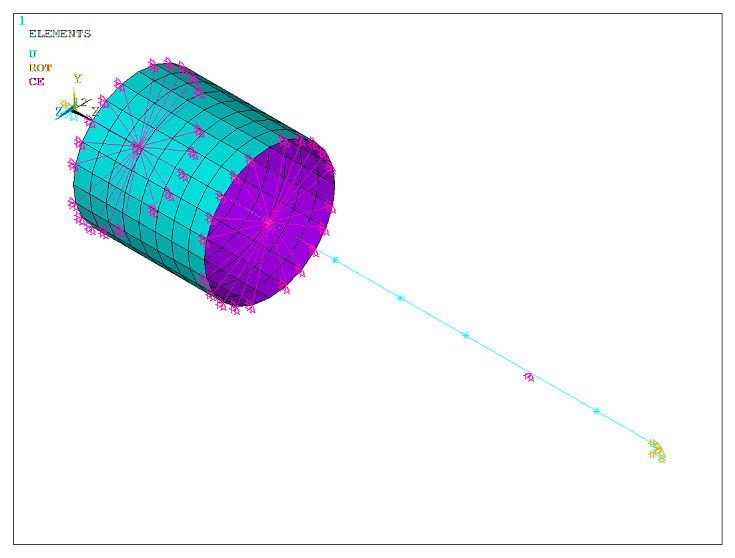
The shafts nodes are rotated along the local z-direction aligned with the global X-direction. The instantaneous nodal velocities are specified along the local x-direction for both shafts using the IC command.
| Rotational velocity of shaft 1 = 1000 RPM |
| Rotational velocity of shaft 2 = 2000 RPM |
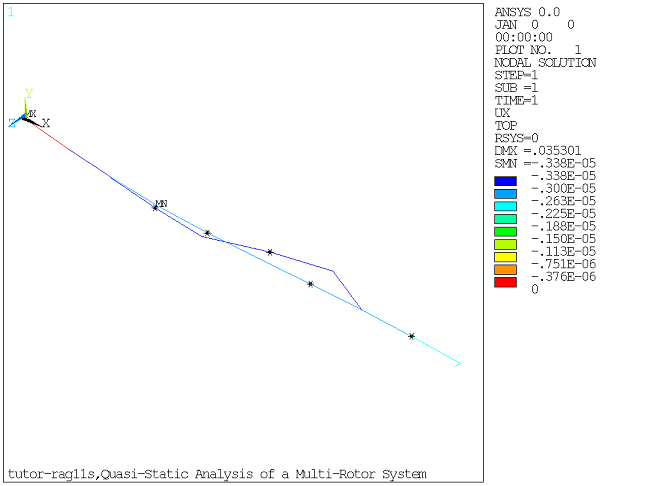
The centrifugal force due to the ICROTATE command definition along the global Z-direction is included in the analysis.
/out,scratch /prep7 LOCAL,12,0,0,0,0,0,0,90 CSYS,0 ! ** ROTOR 1 ET,1,188 SECTYPE,1,BEAM,CSOLID SECDATA,0.1 MP,EX,1,2E11 MP,NUXY,1,0.3 k,1,0,0,0 k,2,9,0,0 l,1,2 lesize,all,,,9 TYPE,1 SECNUM,1 MAT,1 lmesh,all CSYS,12 nrotate,all CSYS,0 ! ** ROTOR 2 ET,2,188 SECTYPE,2,BEAM,CSOLID SECDATA,0.05 MP,EX,2,2E11 MP,NUXY,2,0.3 k,3,2,0,0 k,4,7 l,3,4 lesize,all,,,5 TYPE,2 SECNUM,2 MAT,2 lmesh,all CSYS,12 nrotate,all CSYS,0 ! ** SHELL CASING ET,3,181 SECTYPE,3,SHELL SECDATA,0.1 MP,EX,3,1E11 MP,NUXY,3,0.3 MP,DENS,3,7800 CSYS,12 WPCSYS,-1 CYLIND,1,,1,3 TYPE,3 SECNUM,3 MAT,3 AMESH,3,4 CSYS,0 ALLSEL ! ** DISK MASS 1 ET,4,21 KEYOPT,4,2,0 R,4,75,75,75,125,125,250 TYPE,4 REAL,4 MAT,4 E,6 E,8 E,10 ! ** DISK MASS 2 ET,5,21 KEYOPT,5,2,0 R,5,50,50,50,100,100,200 TYPE,5 REAL,5 MAT,5 E,13 E,15 ! ** BEARING 1 N,1000,9,0,0 CSYS,12 nrotate,all CSYS,0 ET,6,14 KEYOPT,6,2,1 ! >> along X direction R,6,1E7 TYPE,6 REAL,6 MAT,6 E,2,1000 ET,7,14 KEYOPT,7,2,2 ! >> along Y direction R,7,1E7 TYPE,7 REAL,7 MAT,7 E,2,1000 ! ** BEARING 2 LSEL,S,,,3,6 NSLL RBE3,3,ALL,ALL ALLSEL ! ** BEARING 3 LSEL,S,,,7,10 NSLL RBE3,13,ALL,ALL ALLSEL ! ** BEARING 4 CERIG,9,12,UX,UY ! ** BOUNDARY CONDITIONS D,1,ux D,1,uy D,1,uz D,1,rotz D,1000,ALL ! >> grounded ! ** COMPONENTS DEFINITIONS ESEL,S,TYPE,,1 ESEL,A,TYPE,,4 CM,ROT_1,ELEM ALLSEL ESEL,S,TYPE,,2 ESEL,A,TYPE,,5 CM,ROT_2,ELEM ALLSEL,ALL,ALL FINISH ! ** STATIC ANALYSIS /solu antype,static coriolis,on,,,on,,on ! last field for rotor mass summary printout cmomega,ROT_1,1000,,,nx(1),ny(1),nz(1),nx(2),ny(2),nz(2) cmomega,ROT_2,2000,,,nx(11),ny(11),nz(11),nx(12),ny(12),nz(12) kbc,1 cmsel,s,ROT_1 nsle ic,all,omgx,1.0 ! ** rotating about global Z (local x) allsel,all cmsel,s,ROT_2 nsle ic,all,omgx,1.0 ! ** rotating about global Z (local x) allsel,all icrotate,all,1.0,4,0,0,4,0,1 ! ** axis of rotation passing though ! ** node 6 along z - direction outres,all,all /out, solve finish /post1 set,last rsys,0 cmsel,s,ROT_1 cmsel,a,ROT_2 nsle /out, /com, ------------------------------------------------------------ /com, Response UX is due to the centrifugal force. /com, Response UZ and ROTY are due to the gyroscopic moment. /com, ------------------------------------------------------------ prnsol,dof /out,scratch /view,,1,1,1 /show,png,rev plnsol,u,x ! ** response due to centrifugal force plnsol,u,z ! ** response due to gyroscopic moment /show,close finish /exit,nosave
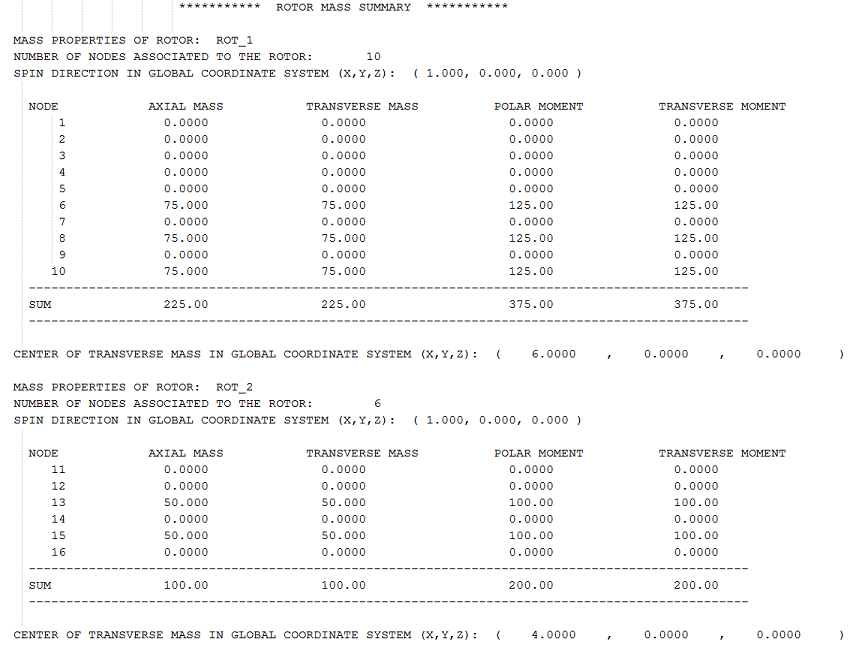
In this example, both rotors are massless. Masses are concentrated at nodes 6, 8, and 10 for rotor 1, and 13 and 15 for rotor 2. The mass information for both rotors can be viewed using the rotor mass summary printout as shown below:
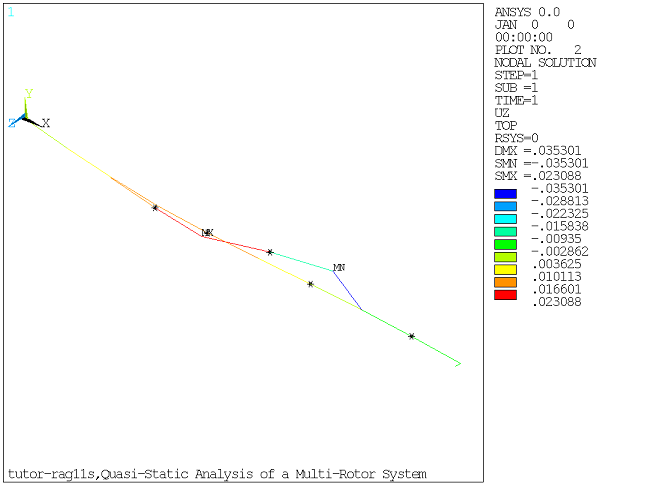
The results of the quasi-static analysis, postprocessed in /POST1, are shown in Figure 7.38: Displacement of the Shafts Along X-Direction Due to Centrifugal Force and Figure 7.39: Displacement of the Shafts Along Z-Direction Due to Gyroscopic Moment.