


Understanding LiDAR Simulation
This page gives a global presentation on LiDAR principles and simulation.
LiDAR Principle
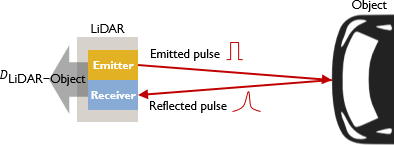
A LiDAR is a device measuring the distance to a target by sending pulsed laser light. It works on the principle of a radar but uses light instead of radio waves.
A LiDAR is composed of a light source (an emitter) and a sensor (a receiver).
The emitter illuminates a target by sending pulsed laser light and evaluates the distance to that target based on the time the reflected pulse took to hit the receiver.
LiDAR Simulation in Speos
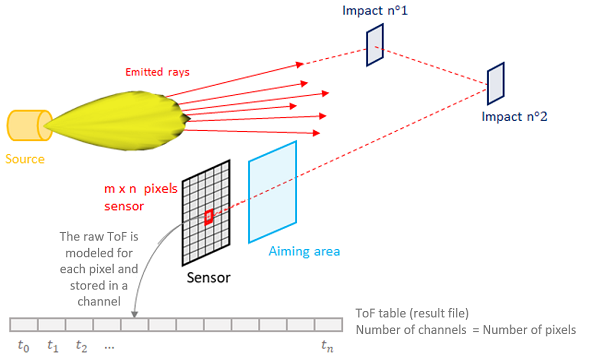
The ray sent by the LiDAR source (emitter channel) interacts with a geometry or vanishes in the environment.
The interaction is managed by the optical properties of the target geometry. A part of the ray energy is reflected towards the LiDAR sensor (receiver channel). This energy contributes to the signal of a pixel. After all contributions are integrated, Speos models the Raw time of flight for each pixel. The Raw time of flight expresses the temporal power on a pixel. A specific power is integrated in each pixel for a given distance.
In the case of static LiDAR simulation, the time of flight is modeled for each pixel of the sensor with one pixel corresponding to one channel in the result file.
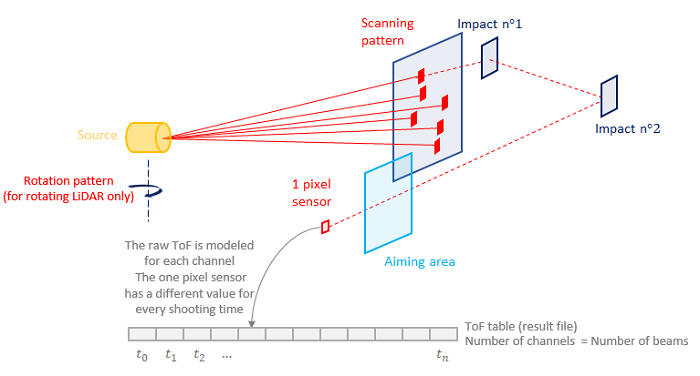
In the case of a scanning or rotating simulation, the record of data is slightly different. Indeed, the number of channels is no longer equal to the number of pixels but to the number of beams. As the beams are sent at different times with a very short interval (of micro seconds- µs), a one-pixel sensor can be used and will have a different time of flight value for each time.
At the end of the optical simulation, Speos applies a signal post-processing to interpret the Raw time of flight signal in a distance. The signal then identifies the time when the maximum power is received by a pixel and computes the distance based on this time and the light celerity.
LiDAR Simulation Results
Speos LiDAR Simulation can provide three types of result: (the results vary based on the type of LiDAR)
Fields of view : visualization of the source, sensor and LiDAR field of view projection in the 3D view.
Raw time of flight signal: power arriving on the sensor, saved in a binary format (*.OPTTimeOfFlight).
Map of depth: LiDAR-object distance measured for each pixel, saved in a xmp map.