Map of Depth
This page describes the map of depth result type that can be obtained from a LiDAR simulation.
Note: Depth maps are generated for solid-state LiDAR simulations
only.
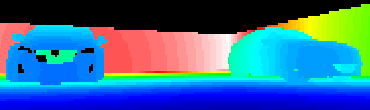
The Map of depth is an extended map (*.XMP) that saves, for each pixel, the distance from the LiDAR to the detected object. This distance is extracted from the raw signal by catching the maximum peak position detected in every pixel. The closeness to objects is expressed with a color scale.
In the illustration below, the smaller the distance from the LIDAR, the closer to the blue.