


VM-LSDYNA-SOLVE-054
VM-LSDYNA-SOLVE-054
Seismic Response of a Mass-Spring-Damper System - Equivalent Structural
Damping
Overview
| Reference: | Thomson, W. T. (1971). Vibration Theory and Applications (3rd impression). Prentice-Hall, Inc., p.72, example 3.1-2. |
| Analysis Type(s): | Implicit Modal, Harmonic Analysis |
| Element Type(s): | 1D Discrete Element, Mass Element |
| Input Files: | Link to Input Files Download Page |
Test Case
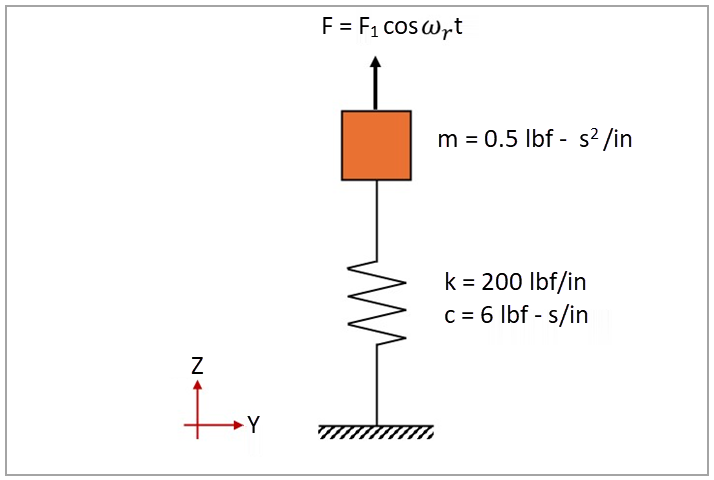
This test case models a mass-spring-damper system with a harmonic disturbing force acting on the mass. The mass is 0.5 lbf-s2/in, the spring stiffness is 200 lbf/in, and the damping constant is 6 lbf-s/in. The force oscillates with an amplitude of 10 lbf. The objective is to validate the resonant amplitude and phase of the system. The spring length is arbitrarily defined as 5.0 in, and damping is implemented as an equivalent structural damping. Figure 183 illustrates the domain dimensions and boundary conditions.
This problem is also presented in test case VM87 in the Mechanical APDL Verification Manual.
The following table lists the main parameters of the test case, which uses the following system of units: length in in, time in s, mass in lbf-s2/in, force in lbf, and pressure in psi.
| Material Properties | Geometric Properties | Loading |
|---|---|---|
|
Spring length
Seismic mass
|
Stiffness constant
Damping coefficient
| Force oscillation ( ) with an amplitude ( ) with an amplitude ( ) of 10 lbf ) of 10 lbf |




Analysis Assumptions and Modeling Notes
The resonant frequency  of the system can be calculated as:
of the system can be calculated as:
 | (30) |
where
 is the stiffness constant of the spring is the stiffness constant of the spring |
and  is the concentrated mass is the concentrated mass |
The resonant frequency of the system is 3.1831 Hz, which is used
as the force oscillation frequency. The resonant amplitude  and phase
and phase  can be calculated as:
can be calculated as:
 | (31) |
 | (32) |
where
 is the force amplitude is the force amplitude |
 is the damping coefficient is the damping coefficient |
and  is the angular frequency during resonance ( is the angular frequency during resonance ( ) ) |
The resonant amplitude and phase angle are 0.0833 in and 90°, respectively.
To implement modal damping in the model, the damping coefficient  must be converted to the modal damping ratio
must be converted to the modal damping ratio  :
:
 | (33) |
For the current test case, the modal damping ratio  is 0.3.
is 0.3.
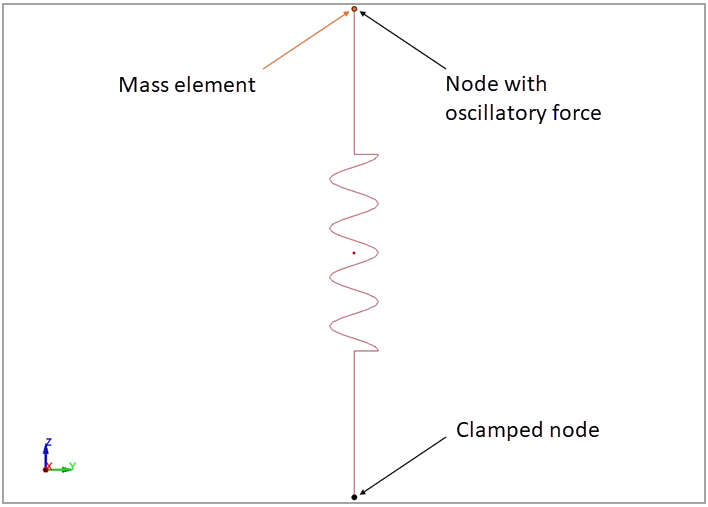
One part is defined to represent the spring, being meshed with a 1D discrete element. This element has a length of 5 in and uses an elastic spring material card (*MAT_SPRING_ELASTIC) with stiffness of 200 lbf/in. A mass element of 0.5 lbf-s2/in is defined for the top node of the structure using *ELEMENT_MASS. Both nodes have their respective motion constraints defined with *BOUNDARY_SPC_NODE. The keywords *CONTROL_IMPLICIT_GENERAL (IMFLAG=1) and *CONTROL_IMPLICIT_EIGENVALUE (NEIG=1) are used to activate the implicit eigenvalue analysis with one eigenvalue to be extracted.
The keyword *FREQUENCY_DOMAIN_SSD is used to activate the steady-state dynamic analysis generated due to the harmonic loading of the mass with the modal damping ratio (DAMPF=0.3). The keywords *DATABASE_FREQUENCY_ASCII_NODOUT_SSD and *DATABASE_FREQUENCY_BINARY_D3SSD are used to create the ASCII and binary output files for steady-state dynamic analysis.
Results Comparison
The visualization of the fundamental mode can be performed by reading the d3eigv file, generated for the modal analysis. The resonance amplitude and phase angle can be observed in the nodout_ssd and d3ssd files, generated for the harmonic analysis. To quantify the error between the theoretical and LS-DYNA results, the resonant amplitude and phase of the mass-spring-damper system, and their relative errors are calculated and shown in the following table. This comparison verifies the agreement between the resonant amplitudes and phases.
| Results | Target | LS-DYNA Solver | Error (%) |
|---|---|---|---|
Resonant amplitude  (in) (in) | 0.08333 | 0.08333 | 0.00 |
Resonant phase angle  (°) (°) | -90 | -90 | 0.00 |