


A Function Expression represents a formula. This entity can be used in the formulation of a force or motion, and for measurement of displacement, velocity, acceleration, and force between several markers in a subsystem.
Various intrinsic functions are supported in a Function Expression as shown in the table below. The resultant value of these intrinsic functions is a scalar.
Figure 8.1: Intrinsic functions in Function expression
| Category | Description |
| Math Functions | Use to set functions defined at the C/C++ math library. |
| Simulation Constants | Use to set variables with an intrinsic keyword. |
| Displacement Functions | Use to calculate the position or angle between the markers. |
| Velocity Functions | Use to calculate the translational velocity or angular velocity between the markers. |
| Acceleration Functions | Use to calculate the translational acceleration or angular acceleration between the markers. |
| Generic Force Functions | Use to calculate the force or torque between two markers. |
| Contact Functions | Use to calculate a value related to the specified contact. |
| System Element Functions | Use to calculate the value of equations. |
| Arithmetic IF Functions | Use to operate a logical function. |
| Interpolation Functions | Use to calculate the value from the specified spline. |
| Predefined Functions | Use to set functions defined at the Motion solver. |
| Interface Parameters and Sub-Entity Functions | Use to calculate a variable for co-simulation or array. |
Simulation Constants are mathematical constants and intrinsic keywords as shown in the table below.
Figure 8.2: Simulation Constants
| Functions | Description | |
| DTOR | Definition | Conversion factor from degree to radians. |
| Value | 0.017453…. This value is equal to PI/180. | |
| PI | Definition | Mathematical constant equal to a circle's circumference divided by its diameter. |
| Value | 3.141592…. This value is equal to ACOS(-1). | |
| RTOD | Definition | Conversion factor from radians to degree. |
| Value | 57.29577…. This value is equal to 180/PI. | |
| TIME | Definition | Simulation time |
| Value | Real variable, equal to the simulation time. | |
Math functions which are supported from the C/C++ math library are shown below:
Figure 8.3: Math functions
| Functions | Description | |
| ABS(E1) | Definition | Use to compute the absolute value of E1. |
| Input (E1) | Real | |
| Return Value | Real ≥ 0 | |
| Example | ABS(-1.5) = 1.5 | |
| ACOS(E1) | Definition | Use to compute the arc-cosine of E1. |
| Input (E1) | -1 ≤ Real ≤ 1. If the input value is greater than 1 or less than -1, it will be limited 1 or -1, respectively. | |
| Return Value | 0 ≤ Real < PI in Radian | |
| Example | ACOS(0.5) = PI/3 | |
| AINT(E1) | Definition | Use to truncate E1 to the whole number part. |
| Input (E1) | Real | |
| Return Value | Integer. If the magnitude of E1 is less than 1, then AINT(E1) returns 0. If the magnitude is equal to or greater than 1, then it returns the largest whole number that does not exceed its magnitude. The sign is the same as the sign of E1. | |
| Example | AINT(-1.5678) = -1, AINT(0.17) = 0 | |
| ANINT(E1) | Definition | Use to round E1 to the nearest whole number. |
| Input (E1) | Real | |
| Return Value | Integer. If E1 is greater than 0, then ANINT(X) returns AINT(E1+0.5). If E1 is less than or equal to 0, then return AINT(E1-0.5). | |
| Example | ANINT(0.4) = 0, ANINT(-1.9) = -2 | |
| ASIN(E1) | Definition | Use to compute the arcsine of E1. |
| Input (E1) | -1 ≤ Real ≤ 1. If the input value is greater than 1 or less than -1, it will be limited 1 or -1, respectively. | |
| Return Value | -PI/2 ≤ Real ≤ PI/2 in Radians | |
| Example | ASIN(0.5) = PI/6 | |
| ATAN(E1) | Definition | Use to compute the arctangent of E1. |
| Input (E1) | Real | |
| Return Value | -PI/2 ≤ Real ≤ PI/2 in Radians | |
| Example | ATAN(1.0) = PI/4 | |
| ATAN2(E1,E2) | Definition | Use to compute the arctangent of E2/E1. |
| Input (E1,E2) | Real | |
| Return Value |
-PI < Real ≤ PI in Radian. The return value can be computed under several conditions as follows. 1) E1 > 0 → ATAN(E2/E1) 2) E1 < 0 & E2 ≥ 0 → ATAN(E2/E1) + PI 3) E1 < 0 & E2 ≤ 0 → ATAN(E2/E1) - PI 4) E1 = 0 & E2 > 0 → PI/2 5) E1 = 0 & E2 < 0 → -PI/2 6) E1 = 0 & E2 = 0 → 0 | |
| Example | ATAN2(1.0,-1.0) = -PI/4, ATAN2(-1.0,1.0) = 3*PI/4 | |
| CEIL(E1) | Definition | Use to return the least integer greater than or equal to E1. |
| Input (E1) | Real | |
| Return Value | Integer | |
| Example | CEIL(0.4) = 1, CEIL(-0.9) = 0 | |
| COS(E1) | Definition | Use to compute the cosine of E1. |
| Input (E1) | Real in Radians | |
| Return Value | Real | |
| Example | COS(PI/3) = 0.5 | |
| COSH(E1) | Definition | Use to compute the hyperbolic cosine of E1. |
| Input (E1) | Real in Radians | |
| Return Value | Real | |
| Example | COSH(PI/18) = 1.01526957 | |
| DIM(E1,E2) | Definition | Use to compute the difference E1-E2 if the result is positive. Otherwise returns zero. |
| Input (E1,E2) | Real | |
| Return Value | Real ≥ 0 | |
| Example | DIM(2,1) = 1, DIM(1,2) = 0 | |
| DIVISION(E1,E2) | Definition | Use to compute the division of E1 by E2, avoiding the division by 0 problem. |
| Input (E1,E2) | Real | |
| Return Value | Real. The return value can be computed under several conditions as follows. 1) E2 = 0 → 0 2) E2 != 0 → E1/E2 | |
| Example | DIVISION(10,4) = 2.5 | |
| EXP(E1) | Definition | Use to compute the base e exponential of E1. |
| Input (E1) | Real | |
| Return Value | Real | |
| Example | EXP(1.0) = e (Euler's number) | |
| FLOOR(E1) | Definition | Use to return the greatest integer less than or equal to E1. |
| Input (E1) | Real | |
| Return Value | Integer | |
| Example | FLOOR(0.4) = 0, FLOOR(-0.9) = -1 | |
| LOG(E1) | Definition | Use to compute the natural (base e) logarithm of E1. |
| Input (E1) | Real > 0 | |
| Return Value | Real | |
| Example | LOG(2.7182818) = 1.0 | |
| LOG10(E1) | Definition | Use to compute the base 10 logarithm of E1. |
| Input (E1) | Real > 0 | |
| Return Value | Real | |
| Example | LOG(100.0) = 2.0 | |
| MAX(E1,E2) | Definition | Use to return the maximum value of E1 and E2. |
| Input (E1,E2) | Real | |
| Return Value | Real | |
| Example | MAX(1,2) = 2 | |
| MIN(E1,E2) | Definition | Use to return the minimum value of E1 and E2. |
| Input (E1,E2) | Real | |
| Return Value | Real | |
| Example | MIN(1,2) = 1 | |
| MOD(E1,E2) | Definition | Use to computes the remainder of the division of E1 by E2. |
| Input (E1,E2) | Real. E2 must be not equal to zero. | |
| Return Value |
Real. The return value can be calculated as follows. E1 - INT(E1/E2) * E2. | |
| Example | MOD(9,4) = 1 | |
| POW(E1,E2) | Definition | Use to computes E1 raised to the power of E2. |
| Input (E1,E2) | Real. E1 must be not equal to zero. | |
| Return Value |
Real. The return value can be computed under several conditions as follows. 1) E1 > 0 → E1^E2 2) E1 = 0 & E2 > 0 → 0 3) E1 = 0 & E2 = 0 → 1 4) E1 = 0 & E2 < 0 → 0 5) E1 < 0 & E2 is an integer number. → E1^E2 6) E1 < 0 & E2 has a finite decimal. → 0 For 4) case and 6) cases, the return value is not calculated but actually Motion solver returns zero value. | |
| Example | POW(2,4) = 16 | |
| RAND(E1,E2) | Definition | Use to returns a pseudo-random number from a uniform distribution between E1 and E2. |
| Input (E1,E2) | Real. E2 must be greater than E1. | |
| Return Value | Real | |
| Example | RAND(6,9) = 6, 7, 8 or 9 | |
| SIGN(E1,E2) | Definition | Use to return the value of E1 with the sign of E2. |
| Input (E1,E2) | Real | |
| Return Value | Real | |
| Example | SIGN(7,-1) = -7, SIGN(-7,-1) = -7, SIGN(-7,1) = 7 | |
| SIN(E1) | Definition | Use to compute the sine of E1. |
| Input (E1) | Real in Radians | |
| Return Value | Real | |
| Example | SIN(PI/6) = 0.5 | |
| SINH(E1) | Definition | Use to compute the hyperbolic sine of E1. |
| Input (E1) | Real in Radians | |
| Return Value | Real | |
| Example | SINH(PI/18) = 0.17542037 | |
| SQRT(E1) | Definition | Use to compute the square root of E1. |
| Input (E1) | Real ≥ 0 | |
| Return Value | Real ≥ 0 | |
| Example | SQRT(4) = 2 | |
| TAN(E1) | Definition | Use to compute the tangent of E1. |
| Input (E1) | Real in Radian. E1 must be not equal to (2N-1)*PI/2. | |
| Return Value | Real | |
| Example | TAN(PI/4) = 1.0 | |
| TANH(E1) | Definition | Use to compute the hyperbolic tangent of E1. |
| Input (E1) | Real in Radians | |
| Return Value | Real | |
| Example | TANH(PI/18) = 0.172782 | |
Note: For cases of infinite value, the Motion solver returns zero.
If division by zero occurs, a warning message will be printed in the *.msg file and the result of function expression will be treated as 0. In this case, the solution may differ from versions prior to 2023 R2. To avoid this problem, use the DIVISION function.
Displacement Functions can be defined as shown in the table below. For each function, if the base and reference markers are not defined, they will be automatically set to the inertia reference marker. The position and orientation of the inertia reference marker are the zero vector and the identity matrix, respectively. The reference marker and base marker can be defined as the same marker, if required.
Figure 8.4: Displacement Functions
| Functions | Description | |
| DM(E1,{E2}) | Definition | The magnitude of the relative position between the markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value |
From Equation 2–65, the magnitude of the vector can be returned as follows:
| |
| Example | DM(p1), DM(p1,p2) | |
| DX(E1,{E2},{E3}) | Definition | The x-component of the relative position between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–66, the x-component of the vector can be returned as follows.
| |
| Example | DX(p1), DX(p1,p2), DX(p1,p2,p2), DX(p1,p2,p3) | |
| DY(E1,{E2},{E3}) | Definition | The y-component of the relative position between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–66, the y-component of the vector can be returned as follows.
| |
| Example | DY(p1), DY(p1,p2), DY(p1,p2,p2), DY(p1,p2,p3) | |
| DZ(E1,{E2},{E3}) | Definition | The z-component of the relative position between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–66, the z-component of the vector can be returned as follows.
| |
| Example | DZ(p1), DZ(p1,p2), DZ(p1,p2,p2), DZ(p1,p2,p3) | |
| AX(E1,{E2}) | Definition | The relative angle with respect to the x-axis of the base marker. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–82 will be returned in radians. | |
| Example | AX(p1), AX(p1,p2) | |
| AY(E1,{E2}) | Definition | The relative angle with respect to the y-axis of the base marker. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–83 will be returned in radians. | |
| Example | AY(p1), AY(p1,p2) | |
| AZ(E1,{E2}) | Definition | The relative angle with respect to the z-axis of the base marker. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–84 will be returned in radians. | |
| Example | AZ(p1), AZ(p1,p2) | |
| PSI(E1,{E2}) | Definition | The first rotation angle from ZXZ Euler angle. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–76 will be returned in radians. | |
| Example | PSI(p1), PSI(p1,p2) | |
| THETA(E1,{E2}) | Definition | The second rotation angle from ZXZ Euler angle. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–77 will be returned in radians. | |
| Example | THETA(p1), THETA(p1,p2) | |
| PHI(E1,{E2}) | Definition | The third rotation angle from ZXZ Euler angle. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–78 will be returned in radians. | |
| Example | PHI(p1), PHI(p1,p2) | |
| YAW(E1,{E2}) | Definition | The first rotation angle from ZYX Euler angle. In the general sense, this can represent a relative angle between two markers with respect to the z-axis of the base marker. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–79 will be returned in radians. | |
| Example | YAW(p1), YAW(p1,p2) | |
| PITCH(E1,{E2}) | Definition | The second rotation angle from ZYX Euler angle. In the general sense, this can represent a relative angle between two markers with respect to the y-axis of the base marker. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–80 will be returned in radians. | |
| Example | PITCH(p1), PITCH(p1,p2) | |
| ROLL(E1,{E2}) | Definition | The third rotation angle from ZYX Euler angle. In the general sense, this can represent a relative angle between two markers with respect to the x-axis of the base marker. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The angle in Equation 2–81 will be returned in radians. | |
| Example | ROLL(p1), ROLL(p1,p2) | |







Velocity Functions can be defined as shown in the table below. In each function, if the base and reference markers are not defined, they will be automatically set to the inertia reference marker. The position and velocities of the inertia reference marker are zero vectors and its orientation is defined as the identity matrix. The reference marker and base marker can be defined as the same marker, if required.
Figure 8.5: Velocity Functions
| Functions | Description | |
| VM(E1,{E2}) | Definition | The magnitude of the relative velocity between the markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value |
From Equation 2–92, the magnitude of the vector can be returned as follows.
| |
| Example | VM(p1), VM(p1,p2) | |
| VR(E1,{E2}) | Definition | The relative velocity in the direction of the relative displacement between two markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value | The relative velocity in Equation 2–101 will be returned. | |
| Example | VR(p1), VR(p1,p2) | |
| VX(E1,{E2},{E3}) | Definition | The x-component of the relative velocity between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From ????, the x-component of the vector can be returned as follows.
| |
| Example | VX(p1), VX(p1,p2), VX(p1,p2,p2), VX(p1,p2,p3) | |
| VY(E1,{E2},{E3}) | Definition | The y-component of the relative velocity between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From ????, the y-component of the vector can be returned as follows.
| |
| Example | VY(p1), VY(p1,p2), VY(p1,p2,p2), VY(p1,p2,p3) | |
| VZ(E1,{E2},{E3}) | Definition | The z-component of the relative velocity between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From ????, the z-component of the vector can be returned as follows.
| |
| Example | VZ(p1), VZ(p1,p2), VZ(p1,p2,p2), VZ(p1,p2,p3) | |
| WM(E1,{E2}) | Definition | The magnitude of the relative angular velocity between the markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value |
From Equation 2–102, the magnitude of the vector can be returned as follows.
| |
| Example | WM(p1), WM(p1,p2) | |
| WX(E1,{E2},{E3}) | Definition | The x-component of the relative angular velocity between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–103, the x-component of the vector can be returned as follows.
| |
| Example | WX(p1), WX(p1,p2), WX(p1,p2,p2), WX(p1,p2,p3) | |
| WY(E1,{E2},{E3}) | Definition | The y-component of the relative angular velocity between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–103, the y-component of the vector can be returned as follows.
| |
| Example | WY(p1), WY(p1,p2), WY(p1,p2,p2), WY(p1,p2,p3) | |
| WZ(E1,{E2},{E3}) | Definition | The z-component of the relative angular velocity between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–103, the z-component of the vector can be returned as follows.
| |
| Example | WZ(p1), WZ(p1,p2), WZ(p1,p2,p2), WZ(p1,p2,p3) | |














Acceleration Functions can be defined as shown in the table below. For each function, if the base and reference markers are not defined, they will be automatically set to the inertia reference marker. The accelerations of the inertia reference marker are zero vectors and its orientation is defined as the identity matrix. The reference marker and base marker can be defined as the same marker, if required.
Figure 8.6: Acceleration Functions
| Functions | Description | |
| ACCM(E1,{E2}) | Definition | The magnitude of the relative acceleration between the markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value |
From Equation 2–111, the magnitude of the vector can be returned as follows.
| |
| Example | ACCM(p1), ACCM(p1,p2) | |
| ACCX(E1,{E2},{E3}) | Definition | The x-component of the relative acceleration between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–112, the x-component of the vector can be returned as follows.
| |
| Example | ACCX(p1), ACCX(p1,p2), ACCX(p1,p2,p2), ACCX(p1,p2,p3) | |
| ACCY(E1,{E2},{E3}) | Definition | The y-component of the relative acceleration between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–112, the y-component of the vector can be returned as follows.
| |
| Example | ACCY(p1), ACCY(p1,p2), ACCY(p1,p2,p2), ACCY(p1,p2,p3) | |
| ACCZ(E1,{E2},{E3}) | Definition | The z-component of the relative acceleration between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–112, the z-component of the vector can be returned as follows.
| |
| Example | ACCZ(p1), ACCZ(p1,p2), ACCZ(p1,p2,p2), ACCZ(p1,p2,p3) | |
| WDTM(E1,{E2}) | Definition | The magnitude of the relative angular acceleration between the markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value |
From Equation 2–120, the magnitude of the vector can be returned as follows.
| |
| Example | WDTM(p1), WDTM(p1,p2) | |
| WDTX(E1,{E2},{E3}) | Definition | The x-component of the relative angular acceleration between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–121, the x-component of the vector can be returned as follows.
| |
| Example | WDTX(p1), WDTX(p1,p2), WDTX(p1,p2,p2), WDTX(p1,p2,p3) | |
| WDTY(E1,{E2},{E3}) | Definition | The y-component of the relative angular acceleration between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–121, the y-component of the vector can be returned as follows.
| |
| Example | WDTY(p1), WDTY(p1,p2), WDTY(p1,p2,p2), WDTY(p1,p2,p3) | |
| WDTZ(E1,{E2},{E3}) | Definition | The z-component of the relative angular acceleration between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 2–121, the z-component of the vector can be returned as follows.
| |
| Example | WDTZ(p1), WDTZ(p1,p2), WDTZ(p1,p2,p2), WDTZ(p1,p2,p3) | |














Generic Force Functions are used to measure a force or torque generated from Force and Joint entities. The markers used to define the function must be the markers used when defining the Force or Joint entity. So, if the action marker of the function is the action marker of the entity, the base marker of the function must be the base marker of the entity. In this case, the returned force or torque from the function is the force or torque applied to the action marker of the entity and they can be expressed as fa and τa as shown in the figure below. Their definitions have been introduced in the documentation sections for the corresponding entity.
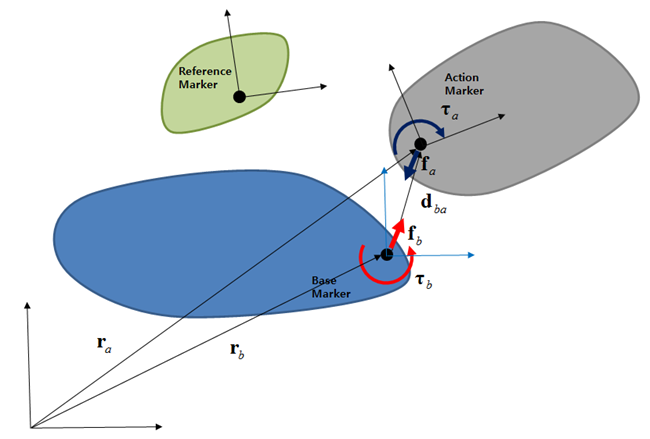
If the force or torque is measured in a reference frame, the resultant force or torque can be calculated as follows.
 | (8–1) |
 | (8–2) |
where Ar is the orientation matrix of the reference marker.
If the action marker of the function is the base marker of the entity, the base marker of the function must be the action marker of the entity. In this case, the returned force or torque from the function is the reaction force or torque at the base marker of the entity and can be calculated from the following equations.
 | (8–3) |
 | (8–4) |
If the force or torque is measured in a reference frame, the resultant force or torque can be calculated as follows.
 | (8–5) |
 | (8–6) |
The generic force functions can be defined as shown in the table below. 1) refers to when the retuned value is the applied force or torque and 2) refers to when the returned value is the reaction force or torque. In each function, if the reference marker is not defined, it will be automatically set to the inertia reference marker. The orientation of the inertia reference marker is defined as the identity matrix.
Figure 8.8: Generic Force Functions
| Functions | Description | |
| FM(E1,E2) | Definition | The magnitude of the force between the markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value |
From Equation 8–3, the magnitude of the force can be returned as follows.
| |
| Example | FM(p1,p2) | |
| FX(E1,E2,{E3}) | Definition | The x-component of the force between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 8–1 and Equation 8–5, the x-component of the vector can be returned as follows. 1) 2) where | |
| Example | FX(p1,p2), FX(p1,p2,p2), FX(p1,p2,p3) | |
| FY(E1,E2,{E3}) | Definition | The y-component of the force between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 8–1 and Equation 8–5, the y-component of the vector can be returned as follows. 1) 2) where | |
| Example | FY(p1,p2), FY(p1,p2,p2), FY(p1,p2,p3) | |
| FZ(E1,E2,{E3}) | Definition | The z-component of the force between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 8–1 and Equation 8–5, the z-component of the vector can be returned as follows. 1) 2) where | |
| Example | FZ(p1,p2), FZ(p1,p2,p2), FZ(p1,p2,p3) | |
| TM(E1,E2) | Definition | The magnitude of the torque between the markers. |
| Input (E1,E2) | E1 and E2 are the names or argument IDs of the action and base markers. | |
| Return Value |
From Equation 8–4, the magnitude of the torque can be returned as follows. 1) 2) | |
| Example | TM(p1), TM(p1,p2) | |
| TX(E1,E2,{E3}) | Definition | The x-component of the torque between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 8–2 and Equation 8–6, the x-component of the vector can be returned as follows. 1) 2) where | |
| Example | TX(p1), TX(p1,p2), TX(p1,p2,p2), TX(p1,p2,p3) | |
| TY(E1,E2,{E3}) | Definition | The y-component of the torque between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 8–2 and Equation 8–6, the y-component of the vector can be returned as follows. 1) 2) where | |
| Example | TY(p1), TY(p1,p2), TY(p1,p2,p2), TY(p1,p2,p3) | |
| TZ(E1,E2,{E3}) | Definition | The z-component of the torque between the markers. |
| Input (E1,E2, E3) | E1, E2 and E3 are the names or argument IDs of the action, base and reference markers. | |
| Return Value |
From Equation 8–2 and Equation 8–6, the z-component of the vector can be returned as follows. 1) 2) where | |
| Example | TZ(p1), TZ(p1,p2), TZ(p1,p2,p2), TZ(p1,p2,p3) | |















Contact Functions are used to get results such as force, torque, penetration, or tangential velocity reported by Contact entities.
Contact Functions support General Contact, Rigid to Rigid 3D Contact (RTR3D Contact), Flex to Rigid 3D Contact (FTR3D Contact), Flex to Flex 3D Contact (FTF3D Contact), FE Tie Contact and EasyFlex Tie Contact.
They do not support Sphere to Multi-Curve Contact, Cylinder to Multi-Curve Contact, and Multi-Curve to Multi-Curve Contact.
Note: If a Function Expression or User Subroutine containing a Contact Function is used as an input function for a force or as a motion function for a joint, convergence may be poor.
Figure 8.9: Supported contact functions for each contact type
| Contact Functions | Supported Contact Types |
| CONTFSUM, CONTFX, CONTFY, CONTFZ, CONTTSUM, CONTTX, CONTTY, CONTTZ | General Contact , Rigid to Rigid 3D Contact (RTR3D Contact), Flex to Rigid 3D Contact (FTR3D Contact) , Flex to Flex 3D Contact (FTF3D Contact) , FE Tie Contact and EasyFlex Tie Contact. |
| CONTNF, CONTGAP, CONTPENE, CONTDPENE, CONTFF, CONTTVEL, CONTFCOEFF, CONTSTAT, CONTSLIPRA, CONTPFMAG, CONTPOENER, CONTNLOSS, CONTFLOSS, CONTKF, CONTCF, CONTCREEP, CONTAREA, CONTKCOEFF, CONTCCOEFF, CONTNPOINT | General Contact , Rigid to Rigid 3D Contact (RTR3D Contact), Flex to Rigid 3D Contact (FTR3D Contact) , and Flex to Flex 3D Contact (FTF3D Contact). |
The contact force  at the ith contact point acting on the
action side and the torque
at the ith contact point acting on the
action side and the torque  generated by the ith contact force,
each measured in the reference frame, are calculated as follows.
generated by the ith contact force,
each measured in the reference frame, are calculated as follows.
 | (8–7) |
 | (8–8) |
 | (8–9) |
Where  is the contact force acting on the action body at the
ith contact point,
is the contact force acting on the action body at the
ith contact point,  is the position of the ith contact
point,
is the position of the ith contact
point,  is the position of the reference marker, and
is the position of the reference marker, and  is the orientation matrix of the reference marker. For more
information, see Intermittent Contact Force.
is the orientation matrix of the reference marker. For more
information, see Intermittent Contact Force.
Contact functions support result types that return the average, sum, minimum, or maximum value at each contact point. Depending on the result type, predefined constant values AVG_RES, SUM_RES, MIN_RES, and MAX_RES or corresponding integer values can be entered. The return according to each result type is as follows.
Figure 8.10: Supported contact functions for each contact type
| Result Type | Predefined Constant | Description | Return Value |
| Average | AVG_RES(0) | Returns the average of the values at each contact point. |  |
| Sum | SUM_RES(1) | Returns the sum of the values at each contact point. |  |
| Min | MIN_RES(2) | Returns the minimum value among the values at each contact point. |  |
| Max | MAX_RES(3) | Returns the maximum value among the values at each contact point. |  |
Where n is the number of contact points and  is real value at the ith contact
point.
is real value at the ith contact
point.
Note that average and summed contact forces or torques acting on the target (action) side are calculated from vector sums. For minimum and maximum, these are a comparison of the magnitudes of the vectors at each contact point.
Contact Functions can be defined as shown in the table below. If the reference marker is not defined, contact functions that measure force and torque will be automatically set to the inertia reference marker. The position and orientation of the inertia reference marker are the zero vector and the identity matrix, respectively. Zero is returned if there are no points in contact.
Figure 8.11: Contact Functions
| Functions | Description | ||||||||||
| CONTFSUM(E1,E2) | Definition | The magnitude of the contact force on the target (action) side. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTFSUM(p1,AVG_RES) | ||||||||||
| CONTFX(E1,E2,{E3}) | Definition | The x-component of the contact force on the target (action) side with respect to the reference marker. | |||||||||
| Input (E1,E2,E3) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) E3: argument ID of the reference marker | ||||||||||
| Return Value |
Where | ||||||||||
| Example | CONTFX(p1,AVG_RES), CONTFX(p1,SUM_RES,p2) | ||||||||||
| CONTFY(E1,E2,{E3}) | Definition | The y-component of the contact force on the target (action) side with respect to the reference marker. | |||||||||
| Input (E1,E2,E3) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) E3: argument ID of the reference marker | ||||||||||
| Return Value |
Where | ||||||||||
| Example | CONTFY(p1,AVG_RES), CONTFY(p1,SUM_RES,p2) | ||||||||||
| CONTFZ(E1,E2,{E3}) | Definition | The z-component of the contact force on the target (action) side with respect to the reference marker. | |||||||||
| Input (E1,E2,E3) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) E3: argument ID of the reference marker | ||||||||||
| Return Value |
where | ||||||||||
| Example | CONTFZ(p1,AVG_RES), CONTFZ(p1,SUM_RES,p2) | ||||||||||
| CONTTSUM(E1,E2,{E3}) | Definition | The magnitude of the torque due to the contact force on the target (action) side with respect to the reference marker. | |||||||||
| Input (E1,E2,E3) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) E3: argument ID of the reference marker | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTTSUM(p1,AVG_RES), CONTTSUM(p1,SUM_RES,p2) | ||||||||||
| CONTTX(E1,E2,{E3}) | Definition | The x-component of the torque due to the contact force on the target (action) side with respect to the reference marker. | |||||||||
| Input (E1,E2,E3) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) E3: argument ID of the reference marker | ||||||||||
| Return Value |
Where | ||||||||||
| Example | CONTTX(p1,AVG_RES), CONTTX(p1,SUM_RES,p2) | ||||||||||
| CONTTY(E1,E2,{E3}) | Definition | The y-component of the torque due to the contact force on the target (action) side with respect to the reference marker. | |||||||||
| Input (E1,E2,E3) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) E3: argument ID of the reference marker | ||||||||||
| Return Value |
Where | ||||||||||
| Example | CONTTY(p1,AVG_RES), CONTTY(p1,SUM_RES,p2) | ||||||||||
| CONTTZ(E1,E2,{E3}) | Definition | The z-component of the torque due to the contact force on the target (action) side with respect to the reference marker. | |||||||||
| Input (E1,E2,E3) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) E3: argument ID of the reference marker | ||||||||||
| Return Value |
Where | ||||||||||
| Example | CONTTZ(p1,AVG_RES), CONTTZ(p1,SUM_RES,p2) | ||||||||||
| CONTNF(E1,E2) | Definition | The contact normal force on the target (action) side at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | |||||||||||
| CONTGAP(E1,E21) | Definition | The contact gap at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
Note: According to Equation 6–21, the contact gap is calculated as positive by the solver, and a positive contact gap is reported with a negative sign to aid user comprehension. | ||||||||||
| Example | CONTGAP(p1,AVG_RES) | ||||||||||
| CONTPENE(E1,E2) | Definition | The contact penetration at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
Note: According to Equation 6–19, contact penetration is calculated as negative by the solver, and negative contact penetration is reported with a positive sign to aid user comprehension. | ||||||||||
| Example | CONTPENE(p1,AVG_RES) | ||||||||||
| CONTDPENE(E1,E2) | Definition | The contact penetration velocity at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (one of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
Note: According to Equation 6–54, contact penetration velocity that increases contact penetration is calculated as negative by the solver. In order to aid user comprehension and indicate penetration velocity that increases contact penetration with a positive sign, negative penetration velocity is reported. | ||||||||||
| Example | CONTDPENE(p1,AVG_RES) | ||||||||||
| CONTFF(E1,E2) | Definition | The contact friction force at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTFF(p1,AVG_RES) | ||||||||||
| CONTTVEL(E1,E2) | Definition | The tangential velocity, which is the relative velocity in the tangential direction at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTTVEL(p1,AVG_RES) | ||||||||||
| CONTFCOEFF(E1,E2) | Definition | The friction coefficient at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTFCOEFF(p1,AVG_RES) | ||||||||||
| CONTSTAT(E1,E2) | Definition | The contact slip status at the contact points.
| |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTSTAT(p1,AVG_RES) | ||||||||||
| CONTSLIPRA(E1,E2) | Definition | The slip ratio at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
The slip ratio at the ith
contact point
where the variables
where n is the number of contact points. | ||||||||||
| Example | CONTSLIPRA(p1,AVG_RES) | ||||||||||
| CONTPFMAG(E1,E2) | Definition | The force magnitude at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTPFMAG(p1,AVG_RES) | ||||||||||
| CONTPOENER(E1,E2) | Definition | The contact potential energy due to the contact spring force at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
The potential energy at the
ith contact point
where
Where n is the number of contact points. | ||||||||||
| Example | CONTPOENER(p1,AVG_RES) | ||||||||||
| CONTNLOSS(E1,E2) | Definition | The loss by the contact damping at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
The loss by contact damping at the
ith contact point
where
Where n is the number of contact points. | ||||||||||
| Example | CONTNLOSS(p1,AVG_RES) | ||||||||||
| CONTFLOSS(E1,E2) | Definition | The loss by contact friction at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
The loss by contact friction at the
ith contact point
where
Where n is the number of contact points. | ||||||||||
| Example | CONTFLOSS(p1,AVG_RES) | ||||||||||
| CONTKF(E1,E2) | Definition | The contact spring force at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTKF(p1,AVG_RES) | ||||||||||
| CONTCF(E1,E2) | Definition | The contact damping force at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTCF(p1,AVG_RES) | ||||||||||
| CONTCREEP(E1,E2) | Definition | The creep at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTCREEP(p1,AVG_RES) | ||||||||||
| CONTAREA(E1,E2) | Definition | The contact area at contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
This function returns 0 if the Node Only option is disabled. When the Point Check option is set to or , the contact area is calculated based on target (action) points. In other cases, the contact area is calculated based on the target (action) or contact (base) points set in Point Check. See General Contact Output for more information. | ||||||||||
| Example | CONTAREA(p1,AVG_RES) | ||||||||||
| CONTKCOEFF(E1,E2) | Definition | The contact stiffness coefficient at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTKCOEFF(p1,AVG_RES) | ||||||||||
| CONTCCOEFF(E1,E2) | Definition | The contact damping coefficient at the contact points. | |||||||||
| Input (E1,E2) | E1: argument ID of the contact E2: result type (One of AVG_RES, SUM_RES, MIN_RES, or MAX_RES) | ||||||||||
| Return Value |
Where n is the number of contact points and
| ||||||||||
| Example | CONTCCOEFF(p1,AVG_RES) | ||||||||||
| CONTNPOINT(E1) | Definition | The number of contact points. | |||||||||
| Input (E1) | E1: argument ID of the contact | ||||||||||
| Return Value | The number of contact points  . . | ||||||||||
| Example | CONTNPOINT(p1) | ||||||||||























































































































































System Element Functions are used to measure variables generated from equation entities. The name or argument ID of the equation entity is needed to define the function. The returned value is a variable which may be defined as follows.
 | (8–10) |
 | (8–11) |
 | (8–12) |
where E, D1 and D2 are the variable equation and first and second order differential equations, respectively. The parameters of the equations refer to position, velocity, acceleration, variables, force, torque and time. For the first and second order differential equations, the time integrated values can be calculated from the following equations.
 | (8–13) |
 | (8–14) |
 | (8–15) |
where  ,
,  and
and  are the initial conditions of the differential equations.
are the initial conditions of the differential equations.
System Element Functions can be defined as shown in the table below.
Figure 8.12: System Element Functions
| Functions | Description | |
| VARVAL(E1) | Definition | The value of the variable equation. |
| Input (E1) | E1 is the name or argument ID of the variable equation. | |
| Return Value | The value of Equation 8–10 will be returned. | |
| Example | VARVAL(p1) | |
| DIF10(E1) | Definition | The integrated variable of the 1st order differential equation. |
| Input (E1) | E1 is the name or argument ID of the 1st order differential equation. | |
| Return Value | The value of Equation 8–13 will be returned. | |
| Example | DIF10(p1) | |
| DIF11(E1) | Definition | The differential variable of the 1st order differential equation. |
| Input (E1) | E1 is the name or argument ID of the 1st order differential equation. | |
| Return Value | The value of Equation 8–11 will be returned. | |
| Example | DIF11(p1) | |
| DIF20(E1) | Definition | The double integrated variable of the 2nd order differential equation. |
| Input (E1) | E1 is the name or argument ID of the 2nd order differential equation. | |
| Return Value | The value of Equation 8–15 will be returned. | |
| Example | DIF20(p1) | |
| DIF21(E1) | Definition | The integrated variable of the 2nd order differential equation. |
| Input (E1) | E1 is the name or argument ID of the 2nd order differential equation. | |
| Return Value | The value of Equation 8–14 will be returned. | |
| Example | DIF21(p1) | |
| DIF22(E1) | Definition | The differential variable of the 2nd order differential equation. |
| Input (E1) | E1 is the name or argument ID of the 2nd order differential equation. | |
| Return Value | The value of Equation 8–12 will be returned. | |
| Example | DIF22(p1) | |
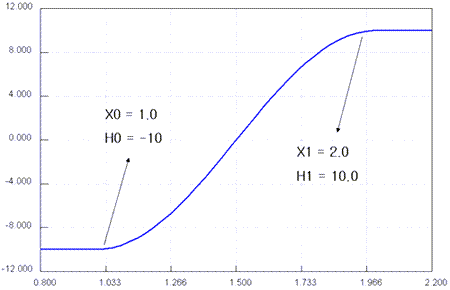
An Arithmetic IF function represents a conditional function and can be defined as shown in the table below.
Figure 8.13: Arithmetic IF Functions
| Functions | Description | |
| IF(E1,E2,E3,E4) | Definition | The conditional function. |
| Input (E1,E2,E3,E4) | E1, E2, E3 and E4 can be defined as constant values, variables or formulas. | |
| Return Value |
A value will be returned oaacrding to the following conditions. 1) E1 < 0 : E2 2) E1 = 0 : E3 3) E1 > 0 : E4 | |
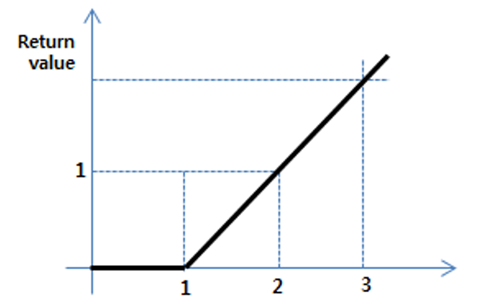
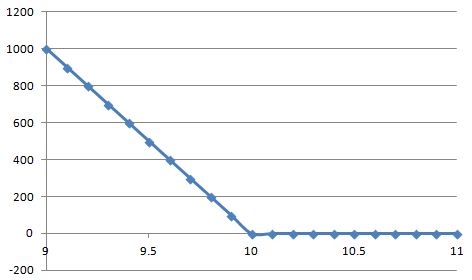
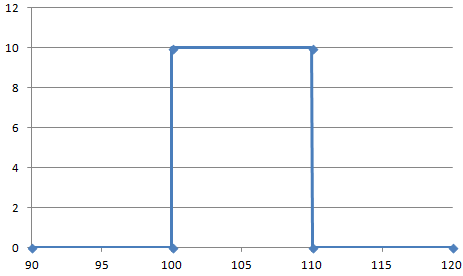
| Example |
IF(time-1,0,0,time-1) The values for time are returned as shown in the figure below. | |
These functions return the interpolated value for the given independent variable with the specified Spline and can be defined as shown in the Interpolation Functions table below.
 | (8–16) |
where the independent variable x must be between the minimum and maximum values of the spline. If the variable is outside this range, the function will return the extrapolated value with the last slope of the spline. The number of values in the data set of the spline must be greater than three. For the Akima interpolation method, the interpolation function of Equation 8–16 can be expressed as follows.
 | (8–17) |
where the coefficients are defined as follows.
 | (8–18) |
 | (8–19) |
 | (8–20) |
 | (8–21) |
 | (8–22) |
The independent variable x is a value between xi and xi+1, which are defined in the spline. yi and yi+1 are corresponding values for xi and xi+1. In Equation 8–17, the slopes of y′ are defined by the following equations.
 | (8–23) |
 | (8–24) |
 | (8–25) |
 | (8–26) |
 | (8–27) |
 | (8–28) |
For the linear interpolation method, the interpolation function of Equation 8–16 can be expressed as follows.
 | (8–29) |
where the slope of si+1 is defined in Equation 8–27.
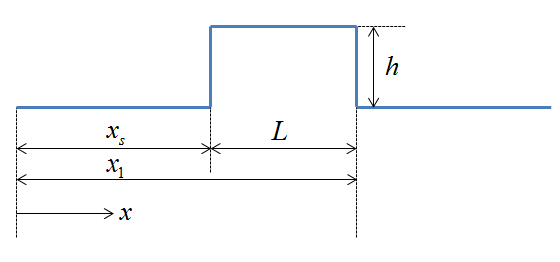
For the three-dimension interpolation method, assume that the function z(x,y) in a rectangle bounded by four straight lines x=x1, x=x2, y=y1 and y=y2 can be expressed by a bicubic polynomial in x and y, and that the polynomial is determined by the values of the function z and its partial derivatives zx, zy and zxy at four corner points (x1, y1), (x1, y2), (x2, y1) and (x2, y2).
The interpolation function can be expressed as follows.
 | (8–30) |
where the p coefficients are
 | (8–31) |
 | (8–32) |
 | (8–33) |
 | (8–34) |
 | (8–35) |
 | (8–36) |
 | (8–37) |
 | (8–38) |
 | (8–39) |
 | (8–40) |
 | (8–41) |
 | (8–42) |
 | (8–43) |
 | (8–44) |
 | (8–45) |
 | (8–46) |
and where
 | (8–47) |
 | (8–48) |
 | (8–49) |
 | (8–50) |
and where
 | (8–51) |
 | (8–52) |
 | (8–53) |
 | (8–54) |
 | (8–55) |
For more details, see the reference below.
Hiroshi Akima, A Method of Bivariate Interpolation and Smooth Surface Fitting Based on Local Procedures, Communications of the ACM, Jan, 1974
Figure 8.15: Interpolation Functions
| Functions | Description | |
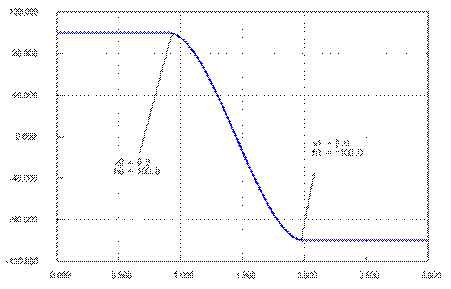
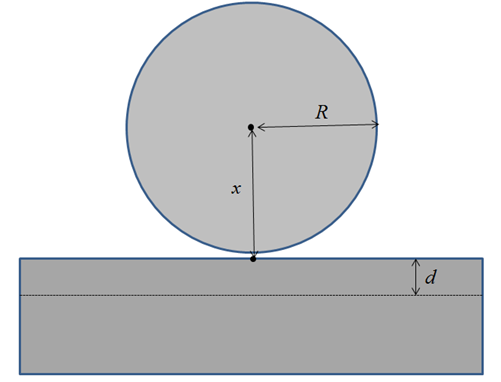
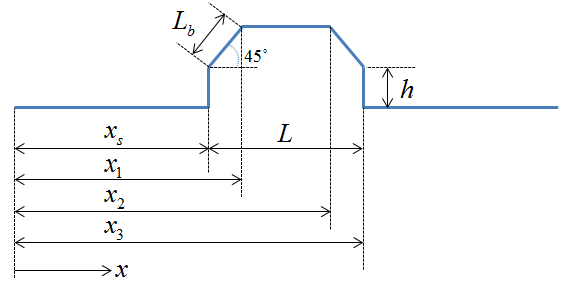
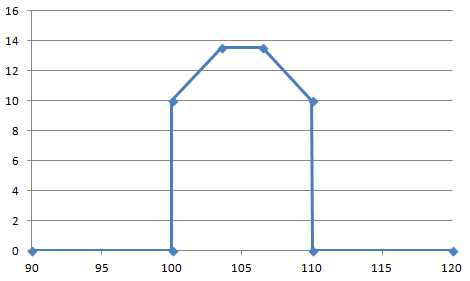
| AKISPL (E1,E2,E3,E4) | Definition | Use to get an interpolated function value for the independent variable with the Akima interpolation method in Equation 8–17. For 2D Splines, the interpolation is performed to determine the y value based on the given x value. In the case of 3D Splines, the interpolation is conducted to ascertain the y value, taking into account both the x and z values. |
| Input (E1,E2,E3,E4) | E1 is the independent variable x and must be a real number or an expression. E2, for 3D splines, represents the independent variable z and must be a real number or an expression. For 2D splines, E2 must be zero due to the absence of a z-dimension. E3 is the name of the argument associated with the targeted spline. E4 determines the order of the returned value. For 3D splines, only order0 is supported. | |
| Return Value |
A value will be returned according to the order (E4) as follows. 0 → 1 → 2 → Orders | |
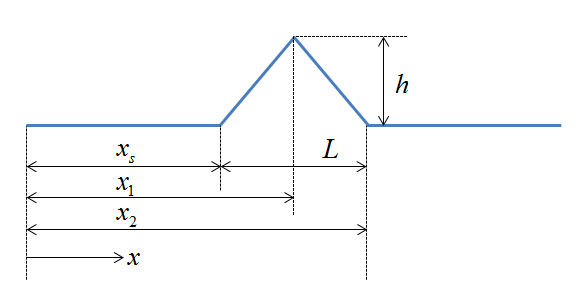
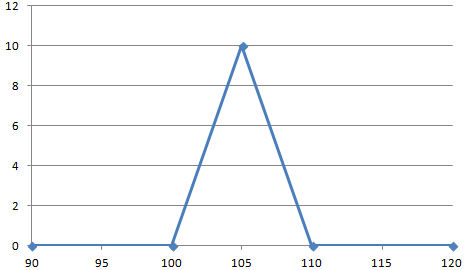
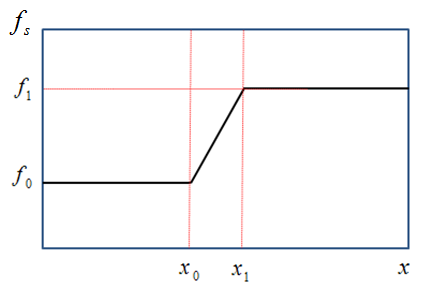
| Example for 2D Splines |
AKISPL(time,0,p1,0) When the spline is defined as shown in Figure 8.16: Example of a 2D Spline, the values for time will be returned as shown in the figure below.
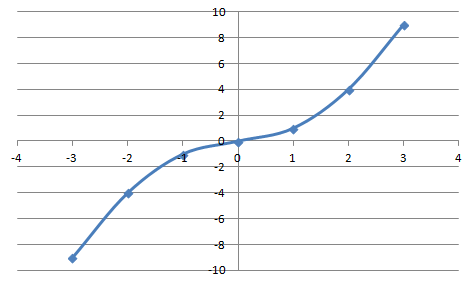
| |
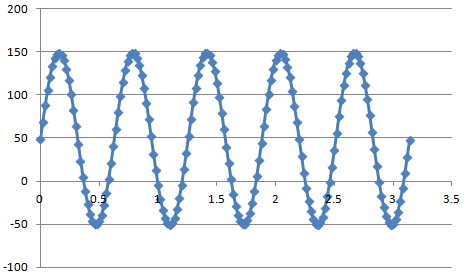
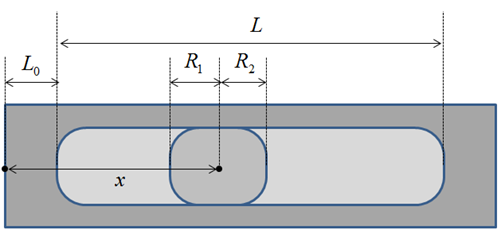
| Example for 3D Splines |
AKISPL(time,WZ(p2,p2,p3),p1,0) In this example, p2 and p3 are the names of the arguments corresponding to the action and base markers of a revolute joint, respectively. When the spline is defined as shown in Figure 8.17: Example of a 3D Spline, the values for time will be returned as shown in the figure below.
| |
| LININT (E1,E2,E3,E4) | Definition | Use to get an interpolated function value for the independent variable using the linear interpolation method in Equation 8–29. |
| Input (E1,E2,E3,E4) |
E1 is real or expression type and the independent variable x. E2 is integer type and must be zero. E3 is the name or argument ID of the spline. E4 is the order of the returned value. | |
| Return Value |
A value will be returned under the condition of the order (E4) as follows. 1) 0 → 2) 1 → 3) 2 → | |
| Example |
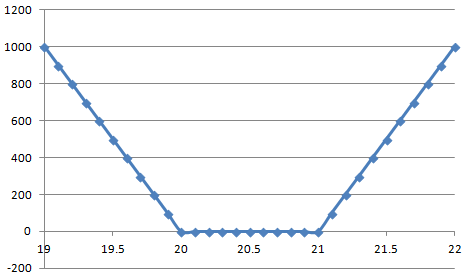
LININT(time,0,p1,0) When the spline is defined as shown in the Figure 8.16: Example of a 2D Spline table below, the values for time will be returned as shown in the figure below.
| |



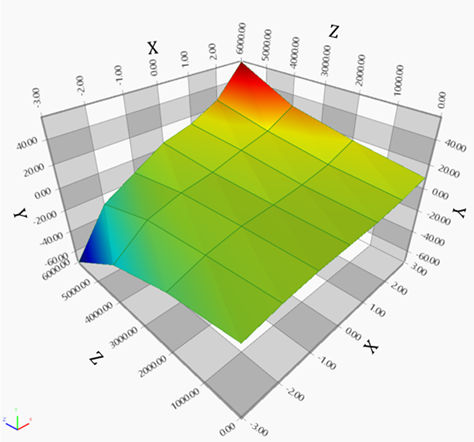
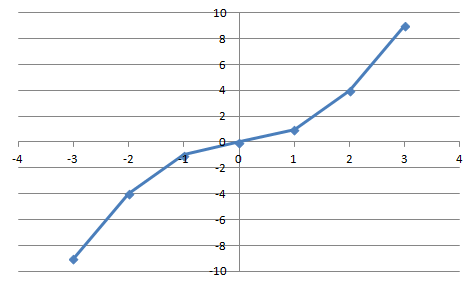
Figure 8.17: Example of a 3D Spline
| Z Data | |||||
| X Data | 0 | 2000 | 4000 | 6000 | |
| -3 | -9 | -18 | -36 | -72 | |
| -2 | -4 | -8 | -13 | -29 | |
| -1 | -1 | -2 | -4 | -12 | |
| 0 | 0 | 0 | 1 | 5 | |
| 1 | 1 | 3 | 9 | 13 | |
| 2 | 4 | 8 | 16 | 27 | |
| 3 | 9 | 19 | 30 | 56 | |
Figure 8.17: Example of a 3D Spline shows Y Data as values determined by corresponding X Data and Z Data, with X Data along the vertical axis, Z Data along the horizontal axis, and Y Data at their intersections.
Note: The input data for splines must follow these rules.
For x-axis and z-axis data:
The data must be entered in order from smallest to largest.
There must be no duplicate values.
There must be no empty data.
There must be at least 4 data points.
For y-axis data:
There must be no empty data.
These functions will help to build a mechanical system and can be defined as shown in the table below.
Figure 8.18: Predefined Functions














































These functions return the value of interface variables under the co-simulation or user-defined array and can be defined as shown in the table below.
Figure 8.19: Interface Parameters and Sub-Entity Functions
| Functions | Description | |
| SINPUT(E1) | Definition | The variable of S-Input. |
| Input (E1) | E1 is the name or argument ID of the SINPUT. | |
| Return Value | A variable value of the specified SINPUT will be returned. | |
| Example | SINPUT(p1) | |
| SOUTPUT(E1) | Definition | The variable of S-Output. |
| Input (E1) | E1 is the name or argument ID of the SOUTPUT. | |
| Return Value | A variable value of the specified SOUTPUT will be returned. | |
| Example | SOUTPUT (p1) | |
| ARRAY(E1,E2) | Definition | The variable of Arrays. |
| Input (E1) | E1 is the name or argument ID of the ARRAY. | |
| Input (E2) | E2 is the sequence of a value which is contained in the array. If you want to get the first value of the array, E2 must be set to zero. | |
| Return Value | A variable value of the specified ARRAY will be returned. | |
| Example |
ARRAY (p1,3) The 4th value of the array
| |
Function expressions can make use of functions contained in imported python code. See User Defined Python Code for more information.