


Kinematics of Links (Soil Interaction) are reported in the Motion Postprocessor as shown in the table below.
Figure 12.177: Definition of kinematics outputs
| Parameter | Symbol | Description | Dimension |
| Position of a contact Point |  | 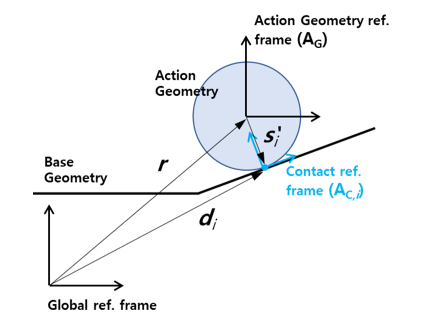 Position of a contact point, di is the position vector w.r.t the global reference frame. And it is reported by U-sub for Soil Interaction. di is calculated as follows.
Where | Length |
| Contact force at a contact point |  |
Contact force at a contact point is the force vector with regards to the contact reference frame. And it is reported by U-sub for Soil Interaction. Contact force at a contact point,
where i is the contact point sequence,
The contact force ( | Force |
| Total Soil Interaction force. |  |
Total soil interaction force is reported by Vector Force entity. Total Soil Interaction force, f is calculated as follows.
Where, n is the number
of the contact point, i
is the contact point sequence, | Force |
| Total Soil Interaction torque. |  |
Total soil interaction torque is reported by Vector Force entity.
Total Soil Interaction torque,
Where | Force * Length |



















