The Coulomb friction model shown in Figure 13.28: Friction Model has two states: sticking and sliding. The friction model is not continuously differentiable at the transition point between sticking and sliding. This can lead to convergence difficulties in some cases. Arctangent friction is designed to help in such cases by providing a smoothly varying frictional stress with respect to the sliding velocity. As opposed to the Coulomb friction model, the Arctangent friction model is a viscous one, where the frictional stress depends upon the sliding velocity. The frictional stress is related to the sliding velocity in the following way:
 | (7–1) |
Where  is a reference slip rate. This is controlled by the real contact 23 of
the contact element.
is a reference slip rate. This is controlled by the real contact 23 of
the contact element.
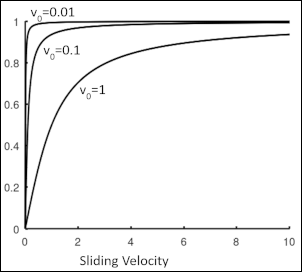
Figure 7.1: Arctangent Friction shows how the frictional stress approaches
the sliding frictional stress  from the coulomb friction asymptotically as the sliding velocity
increases. The figure also shows the effect of the reference slip rate,
from the coulomb friction asymptotically as the sliding velocity
increases. The figure also shows the effect of the reference slip rate,  on the frictional stress. For the same slip rate, as the reference
slip rate is decreased, the frictional stress equals
on the frictional stress. For the same slip rate, as the reference
slip rate is decreased, the frictional stress equals  at a faster and steeper rate. Thus, a small value of
at a faster and steeper rate. Thus, a small value of  compared to typical slip rate in the problem will make the frictional
stress variation closer to classic coulomb friction but may make problem harder to
converge, while a large value of
compared to typical slip rate in the problem will make the frictional
stress variation closer to classic coulomb friction but may make problem harder to
converge, while a large value of  might be easier to converge but the frictional stress may not reach
the coulomb friction dictated value of
might be easier to converge but the frictional stress may not reach
the coulomb friction dictated value of  . The recommended value of
. The recommended value of  is around 1/10th to 1/100th of the typical sliding rate. By default,
it is set to be elastic slip tolerance (which in turn, is a function of average mesh
length) per unit time.
is around 1/10th to 1/100th of the typical sliding rate. By default,
it is set to be elastic slip tolerance (which in turn, is a function of average mesh
length) per unit time.