


Revolute Joint
In order to compute the resisting friction torque, the revolute joint is considered as a cylinder pin assembly. The cylinder is characterized by its inner radius, outer radius, and an effective length. These lengths are shown in the following figure:
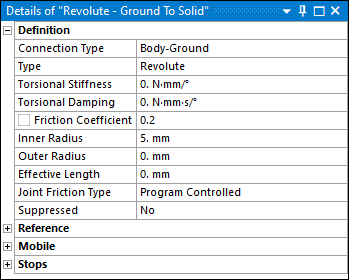
The joint friction creates a resisting torque along the joint z-axis.
The tangential friction torque along the z-axis is computed as:
 | (9–5) |
Where:
 = the normal force = the normal force |
 = the friction coefficient = the friction coefficient |
 = the cylinder radius = the cylinder radius |
The effect of the joint axial force (along the joint z-axis) is evaluated as:
 | (9–6) |
Where  = the outer radius.
= the outer radius.
The bending moment is computed as:
 | (9–7) |
Where  = the effective length.
= the effective length.
The resultant friction moment is given by:
 | (9–8) |
Note: The bending torque is computed only if the effective length is greater than 0; the axial torque is computed only if the outer radius is greater than 0.
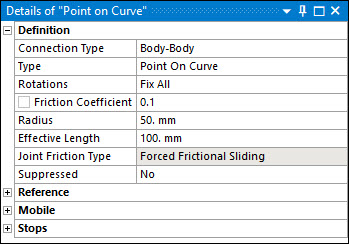
Translational and Point on Curve Joints
In the case of the translational and point on curve joints, a resisting force is created along the joint x-axis. An effective radius and effective length are needed to compute the torsional friction force and the bending friction force, respectively (see the figure below).
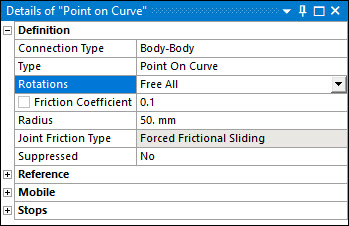
The torsional and bending effects are computed for the point on curve joint if all rotations are fixed.
However, when all rotations are free, the friction length is not available and the radius is taken into account for computing a friction moment as described for spherical joints.
The tangential friction force is computed as:
 | (9–9) |
where:
 = the normal force = the normal force |
 = the friction coefficient = the friction coefficient |
The bending friction force is given by:
 | (9–10) |
where  = the effective length.
= the effective length.
The torsional friction force is evaluated as:
 | (9–11) |
where  = the effective radius.
= the effective radius.
The friction force is computed as:
 | (9–12) |
Note: The bending force is computed only if the effective length is greater than 0; the torsional force is computer only if the effective radius is greater than 0.
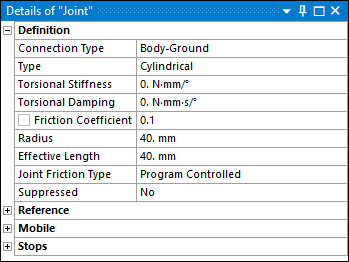
Cylindrical Joint
For a cylindrical joint, both a resisting force and a resisting torque are created along the joint z-axis. Similarly to the revolute joint, the joint is considered as a cylinder pin assembly. An effective length is required for computing the bending friction force and torque:
The friction force and friction torque are computed similarly to the translational and revolute joint, respectively but without the axial and torsional effects:
 | (9–13) |
 | (9–14) |
Note: The bending force and torque are computed only if the effective length is greater than 0.
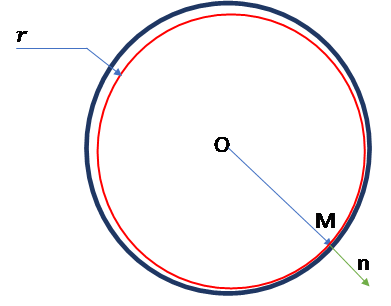
Spherical Joint
Spherical joints are considered imperfect, so there is a gap between the inner and the
outer spheres. If O is the center of the joint and the contact occurs
at one point M, the vector  is defined as
is defined as  as shown in the following figure:
as shown in the following figure:
Where:
 is the constrained force of the joint.
is the constrained force of the joint. is a normal vector at the contact point M,
defined as
is a normal vector at the contact point M,
defined as 
A linear velocity is defined as  . A friction force can be calculated as
. A friction force can be calculated as  .
.
Finally, the friction moment is given by  .
.
Note that similar to revolute joints where the friction force is uniformly distributed
around the joint so that the resulting force sums to zero, only the friction torque is
considered in the computation. The friction force  is not considered nor reported.
is not considered nor reported.
Only Forced Sliding Friction is allowed for Spherical joints.
Slot Joint

For slot joints, a resistant friction force is computed along the X axis. The calculation of this force is similar to translational joints but without bending or torsional effects. Furthermore, a friction moment is computed, similarly to spherical joints, which resists the joint rotations.
Universal Joint
For universal joints, two resistant moments are computed along X and Z axis, respectively. The calculation of this friction moment is similar to revolute joints but without axial or bending effects.
In-Plane, Spherical, and Radial Gap Joints
For imperfect joints, the Friction Coefficient property appears under the Stops definition group:
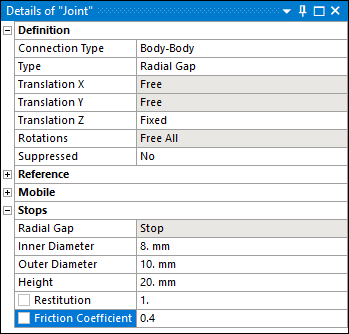
The friction in imperfect joints is considered under the assumption of pure sliding friction. The friction tensor is evaluated similarly to a Forced Frictional Sliding contact.
General Joint
If the joint has a single translational degree of freedom, a friction force is computed along this axis similarly to translational joints.
If the joint has a single rotation degree of freedom, a friction moment is computed similarly to revolute joints.
No bending, axial or torsional effects are evaluated for general joints.
When all the rotations are set free, a friction moment is computed similarly to spherical joints.
