


The following figure shows the digger-arm assembly with all parts identified:
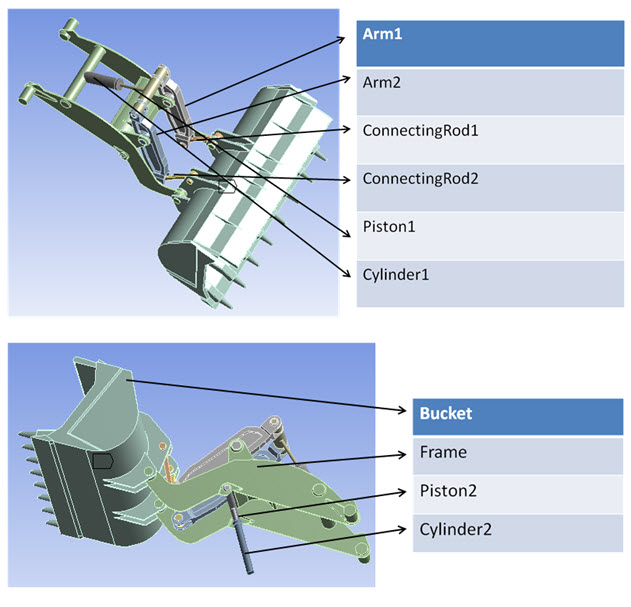
A mass of 500 kg (not shown) is attached to the bucket to simulate the load the bucket carries.
The various parts of the digger-arm assembly are connected to each other using joints. Actuation of the two piston-cylinder arrangements causes the frame, arms, and connecting rods to move, thereby causing the bucket to move as well. The entire system has essentially two free degrees of freedom.
The motion of the frame, arms, connecting rods, and the bucket are dependent on the two free degrees of freedom. For this problem, the motion of the digger-arm is restricted to in-plane motion.
Transient dynamic analyses are conducted on the multibody system as follows:
The first analysis assumes that the connecting rods are flexible and all other parts are rigid. The flexible parts are modeled using 3D finite elements.
The second analysis is a variation of the first analysis. The flexible connecting rods are now modeled as CMS superelements.