


Use the SOLOPTION command to activate the automatic transition from a static to a transient solution:
SOLOPTION, Option,
Type, Value
The following Option values are available:
| STOT - Use a criterion for transitioning from the static solution to the transient dynamic solution. |
| TTOS - Use a criterion for transitioning from the transient dynamic solution back to the static solution. |
| TTOT - Use a criterion for transitioning from one time integration algorithm to another for a transient dynamic solution between load steps. |
Issue the command two times to specify both controls, or issue the command once with no arguments to activate the automatic solution transition using default settings (see SOLOPTION for default values). The command is valid only in the solution processor (/SOLU) and must be issued before the first SOLVE command.
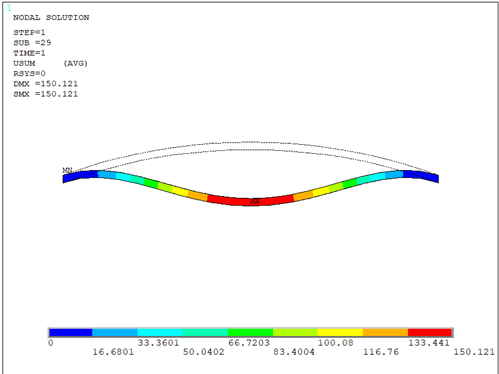
To illustrate the basic solution transition procedure, the steps are explained with respect to the representative example shown below. The analysis involves snap-through of a slender beam under pressure.
A static solution will have difficulty converging for this model at the point of snap-through.
You might attempt to use nonlinear stabilization (STABILIZE command) to achieve convergence in the static simulation, but the stabilization procedure requires you to experiment with the stabilization factor.
A simpler way to achieve convergence is to implement the automatic solution transition. Only two SOLOPTION commands are needed beyond the typical input:
Example 3.1: SOLOPTION Commands Used for the Slender Beam Snap-Through
soloption ! Transition to a quasi solution when the static solution fails to converge (default settings) soloption,ttos,time,0.1 ! Attempt a transition back to static solution after solving the transient for 0.1 seconds
If SOLOPTION is issued with no arguments specified, as in the above example, the static solution transitions to a quasi-static transient solution if the static solution fails to converge. This equates to the default command settings: SOLOPTION,STOT,CONV,QUASI.
The different phases of the solution transition initiated by the above commands are described below.
Initial Static Solution Phase
The solution starts off as a static analysis. The SOLOPTION command enables the solver to switch to a transient solution when the static method fails to converge. In this example, the quasi-static transient option (which uses backward Euler time integration, TINTP,QUAS) is specified. The transition is noted in the output:
>>> TRANSITIONING TO QUASI-STATIC SIMULATION
Transient Solution Phase
During the transient solution phase, the solution follows the time integration scheme specified with SOLOPTION (quasi-static in this case). Most of the commands valid for transient simulation (for example, TRNOPT and TINTP) can be issued to control the time integration settings. During the transient phase of the solution, the kinetic energy and potential energy are printed out along with the residual norms. For example:
Kinetic Energy = 0.2271 Potential Energy = 0.8017E+08
When solving a quasi-static problem, the ratio of the kinetic to potential energy is a good indicator of how close the transient solution is to the static solution. As a rule of thumb, kinetic energy should be < 1% of potential energy. Reducing the density of the materials can help lower the kinetic energy.
The monitor file (Jobname.mntr) automatically lists the total kinetic and potential energies under variables 2 and 3 whenever the solution transition scheme is activated. If you explicitly input the MONITOR command to monitor variables, that command takes precedence and the energies are not printed.
Transitioning Back to the Static Solution
Specify a second SOLOPTION command if you want the solution to attempt to come back to a static solution after the transient phase. In this example, the second command is:
soloption,ttos,time,0.1
This tells the solver to spend 0.1 time units in the transient solution phase and then attempt to come back to the static solution. The following message is displayed:
>>> TRANSITIONING TO STATIC SIMULATION
When the transition back to a static solution occurs, the residual for equilibrium includes the inertial force generated in the transient phase. This inertial force must be balanced. At first, the external load and the residual from the transient phase are applied together, and the solver tries to achieve convergence. If the solver fails to converge, it bisects until the minimum time increment is reached. After that, only the residual from the transient phase (inertial force) is applied, and no additional external load is applied. The program issues this message to indicate only the transient residual is applied in the substep:
*** BEGIN BISECTION NUMBER 6 NEW REBALANCE FACTOR INCREMENT= 1.0000
Further bisections will change the rebalance factor increment and indicate how much of the residual from the transient phase is applied.
After the residual from the transient solution is completely rebalanced, the analysis proceeds with regular time incrementation and loading in the static run.
Sometimes the static solver cannot rebalance the residual from the transient phase, and
convergence fails. In this case, the program then switches back to the transient solver and
the counter is reset back to 0. The next attempt to come back to the static solver is made
after the time interval specified on the
SOLOPTION,TTOS,TIME command.
For the example shown in Figure 3.1: Solution Transition Example Model - Collapse of a Slender Beam, the problem fails to converge right at the point of collapse and then successfully transitions back to a static solution at the end of the collapse event.