


[クイック感度] (Quick Sensitivity)
光学系の感度を簡単に見積もることができる機能です。

公差オペランドの定義がすべて完了したら、クイック感度解析を実行することで、光学系の感度を簡単に推定できます。このツールは公差解析ツールに似ていますが、公差解析ツールが感度を高い精度で計算するための複数の設定機能を備えているのに対し、クイック感度解析ツールは、計算速度を最大化するために簡略化されています。
このツールでは、近軸焦点補償を伴う感度のみを解析します。
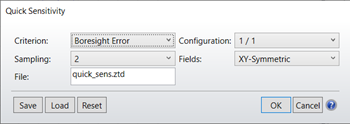
設定 :
[基準] (Criterion) : 公差の判定基準を指定します。そのオプションは以下のとおりです。
[RMS スポット サイズ (半径、x、または y)] (RMS spot size (radius, x, or y)) : 回折限界に接近していない光学系に最適な選択肢です。たとえば、収差が 1 波長を超える光学系が挙げられます。これは最速のオプションです。OpticStudio では、公差解析で常にセントロイド基準を使用します。
[RMS 波面] (RMS wavefront) : 回折限界に接近している光学系に最適な選択肢です。たとえば、収差が 1 波長未満の光学系が挙げられます。これは、RMS スポット半径とほぼ同じ速度で処理されます。OpticStudio では、公差解析で常にセントロイド基準を使用します。
[照準誤差] (Boresight error) : 照準誤差は、軸上の視野で追跡した主光線の動径座標を有効焦点距離で除算して定義します。この定義により、像の角偏差を測定できます。OpticStudio では、1 つの BSER オペランドを使用するだけでボアサイト エラーをモデル化できます (BSER の詳細については、「最適化」の章を参照)。ボアサイト エラーは、主波長の光線を使用して必ずラジアンの単位で計算します。ボアサイト エラーは、半径方向に対称性がある光学系でのみ使用できます。ボアサイト エラーでは、像質の指定はないことに注意してください。これは、軸上光線の偏差の測定値です。
[RMS 角半径、x 収差、または y 収差] (RMS Angular radial, x, or y aberrations) : この公差基準は、アフォーカル光学系に最適です (「アフォーカル像空間」を参照)。角収差は、射出光線の方向余弦に基づいています。
[サンプリング] (Sampling)[サンプリング] (Sampling) は、基準の計算で追跡する光線の数を設定します。サンプリング値が高いとより多くの光線が追跡されるため、より正確な結果を得られます。ただし、実行時間は長くなります。選択した基準が RMS スポットや RMS 波面の場合、サンプリング値は、ガウシアン求積法の手法において瞳の放射状アームに沿って追跡された光線数を表します (この手法の説明については、「瞳の積分法の選択」を参照)。アーム数は、各アームにおける光線数の常に 2 倍になります。通常、高品質な光学系であればサンプリング値として 3 または 4 を指定すれば十分です。収差が大きな光学系は、低収差の光学系よりも高いサンプリング値を必要とします。最適なサンプリング設定を判別するための最も信頼できる方法は、サンプリング値 3 で解析を実行してから、サンプリング値 4 で再実行することです。結果の変化が緩やかな場合は、より高い設定を使用します。結果にかなりの変化が見られるときは、次に、より高いサンプリング設定で確認します。結果の変化がわずかなときは、より低いサンプリング設定に戻します。サンプリング設定を必要以上に高くすると、計算時間は長くなりますが、結果の正確性は増しません。
[コンフィグレーション] (Configuration) : マルチコンフィグレーション レンズの場合に、どのコンフィグレーションを使用するかを指定します。選択したコンフィグレーションのみが考慮され、そのコンフィグレーション番号が最終レポートに出力されます。[すべて] (All) を選択すると、すべてのコンフィグレーションが一度に考慮されます。
[視野] (Fields)OpticStudio では、次の 3 種類の視野設定を使用できます。
[Y 対称] (Y-Symmetric) : OpticStudio では、最大視野座標が計算された後、Y 軸方向にのみ、その最大視野座標の +1.0、+0.7、0.0、-0.7、-1.0 倍の位置に新しい視野点が定義されます。X 視野値は、すべてゼロに設定されます。これは回転対称レンズのデフォルトです。
[XY 対称] (XY-Symmetric) : 使用する視野点が 9 つであることを除けば、[Y 対称] (Y-Symmetric) と似ています。[Y 対称] (Y-Symmetric) で使用する 5 つの点のほか、X 軸方向にのみ -1.0、-0.7、+0.7、+1.0 の各点が追加されます。
[ユーザ定義] (User Defined) : 現在のレンズ ファイルに存在する視野定義を使用します。このオプションは、ビネッティング ファクタの使用時、マルチコンフィグレーション レンズの公差解析の実行時、または公差スクリプトの使用時に必要になります。また、非回転対称レンズや、ユーザー定義の視野の使用が必要になる複雑な視野重み付けが設定されているレンズの公差解析を実行する際に、その使用を強くお勧めします。
ユーザー定義の視野を使用する際には、重み付けの調整は行われません。[Y 対称] (Y-Symmetric) の場合、中心点の重み付けは 2.0 で、残りのすべての点の重み付けは 1.0 になります。[XY 対称] (XY-Symmetric) の場合、中心点の重み付けは 4.0 で、残りのすべての点の重み付けは 1.0 になります。
[ファイル] (File) : このフィールドでは、プロジェクトのディレクトリに保存する ZTD ファイルの名前を指定できます。この ZTD ファイルには、公差解析の実行で生成されたデータがすべて保存されており、公差解析で読み取ることができます。
その他のボタン
ダイアログ ボックスの最下部には、以下の 5 つのボタンがあります。
[保存] (Save)現在選択されているオプションを QS ファイルとして Configs フォルダに保存します。QS ファイルの名前はユーザーが選択します。
[読み込み] (Load):以前に保存したファイルからクイック感度解析のオプションを復元します。
[リセット] (Reset) : 各設定をデフォルトの値に復元します。
[OK] (OK): 現在のオプションを使用してクイック感度解析を実行します。
[キャンセル] (Cancel): クイック感度解析を実行せずにダイアログ ボックスを終了します (以前の設定が復元されます)。
すべてのオプションを選択したら、[OK] (OK) をクリックしてクイック感度解析を開始します。
次へ :