(第一部分)学习如何使用周期性运动、复制几何结构和材料的周期性注入来设置和处理仿真。
(第二部分)学习如何分析周期性注入产生的颗粒轨迹,以及浪涌期间的质量流和每个铲斗中的质量载荷。
本教程的目的是介绍如何使用周期性运动与复制几何结构。
考虑的场景是斗式输送机因装载不一致而出现材料浪涌。
我们将在第二部分对仿真结果进行后处理。
您将了解如何:
定义可以周期性重复的运动
沿指定路径多次复制几何组件
使用周期性注入仿真浪涌加载场景
您将使用这些功能:
入口
周期性运动
几何结构复制
周期性注入
重要: 本高级教程包含的细节、截图和步骤比其他Rocky教程要少。
高级教程主要面向的用户不仅更熟悉Rocky用户界面(UI),而且已经非常了解常见设置和后处理任务。
如果您还未达到这种熟悉程度,建议您在开始本教程之前至少先完成教程01~05。
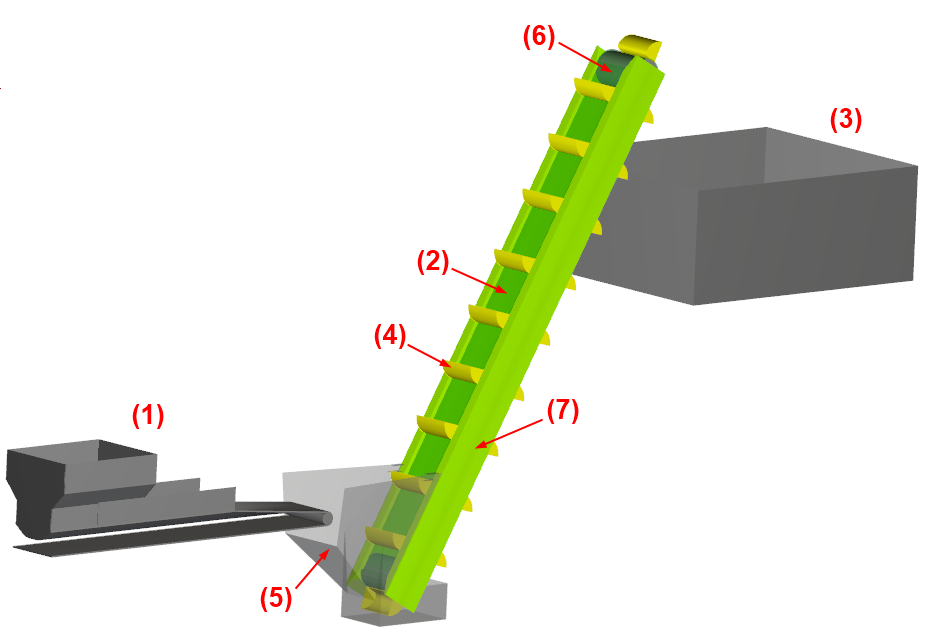
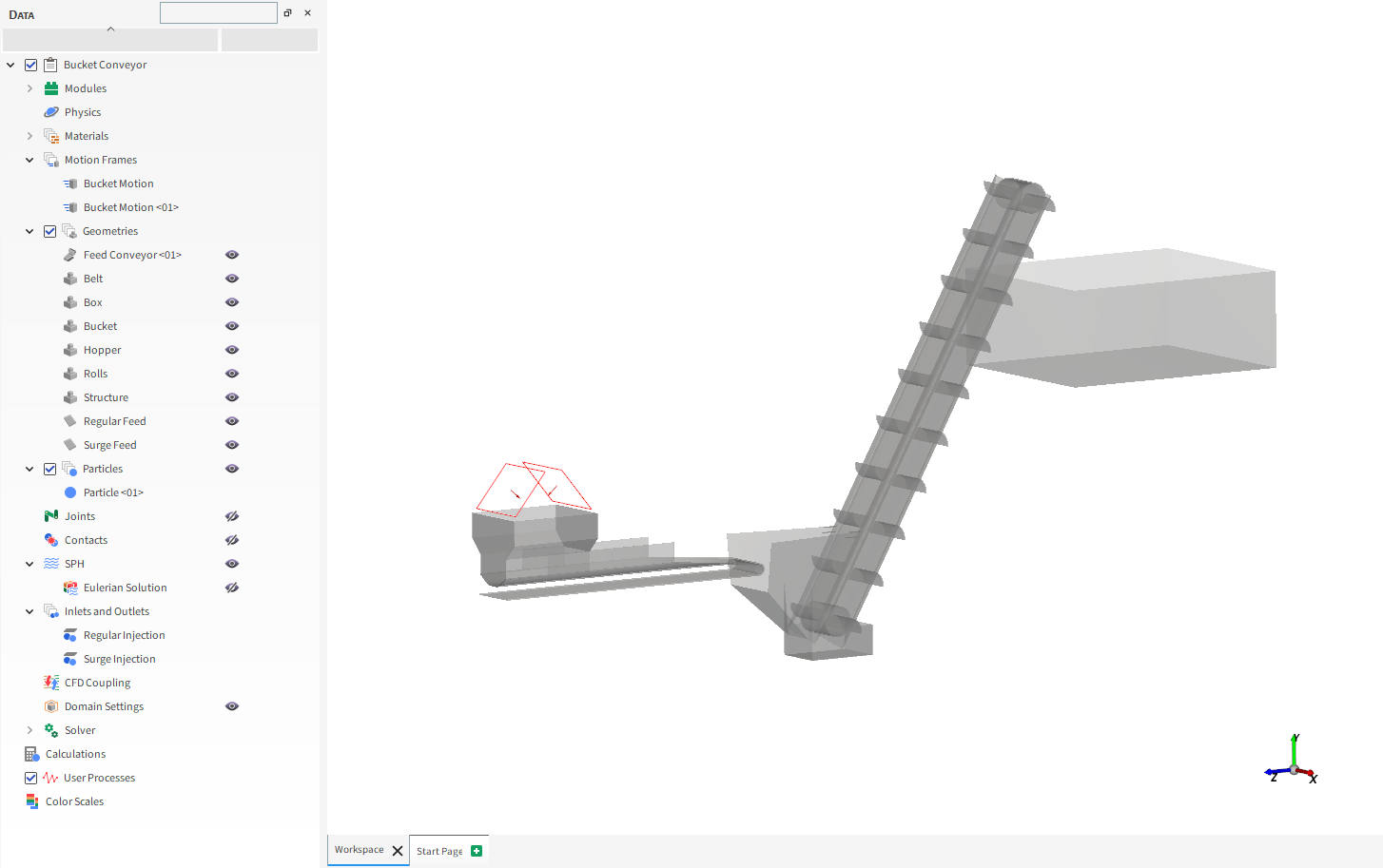
本教程中的几何结构包括:
(1)进料传送带
(2) 传动带
(3) 箱体
(4) 铲斗
(5) 料斗
(6) 轧辊
(7) 结构
第一个项目将根据Rocky输送机模板创建。
其余组件将作为.stl文件导入,所有这些文件都可以在教程目录中找到。
要开始设置本教程,请执行以下操作:
在此处 下载
dem_tut10_files.zip文件。将
dem_tut10_files.zip解压缩到您的工作目录下。打开Rocky2025 R1。
创建一个新项目。
将空白项目保存到您选择的位置。
使用下表中的信息开始设置您的Rocky项目。
步骤 数据实体 编辑器位置 参数或操作 设置 A 研究 研究 Study Name Bucket Conveyor B Physics Physics | Momentum Rolling Resistance Model Type C: Linear Spring Rolling Limit ⯆ Numerical Softening Factor 0.1 [ - ] 提示: 如果您在这些表格中遇到不熟悉的设置或步骤,请参阅Rocky用户手册 和/或其他教程(通过入门教程和高级教程),以找到您需要的详细说明。
在Geometries步骤中,我们将导入以下6个.stl格式的几何结构文件:

我们还将添加一个默认的Feed Conveyor,然后创建两个单独的入口(来自两个不同的表面),分别用于释放常规和浪涌材料。
使用下表中的信息导入并创建这些组件。
步骤 数据实体 编辑器位置 参数或操作 设置 A Geometries Import Wall 所有6个.stl文件的Import Unit均为“mm” B Geometries 创建Feed Conveyor C Geometries ﹂Feed Conveyor <01>
Feed Conveyor | Geometry
Transition Length 1 [m] Loading Length 2 [m] Belt Width 0.5 [m] Belt Thickness 0.0125 [m] D Geometries ﹂Feed Conveyor <01>
Feed Conveyor | Orientation
Alignment Angle 90 [dega] Vertical Offset 0.6 [m] Horizontal Offset -0.07 [m] Out-of-plane Offset 0.95 [m] E Feed Conveyor | Skirtboard
宽度 0.45 [m] 长度 1.5 [m] Skirtboard Length 0.2 [m] Length Offset 0.5 [m] F Feed Conveyor | Feeder Box
Drop Box Length 1 [m] Drop Box Width 0.75 [m] Drop Box Heigth 0.25 [m] 壁面厚度 0.00625 [m] G Feed Conveyor | Head Pulley
Face Width 0.5 [m] 直径 0.1 [m] H Geometries ﹂Feed Conveyor <01>
Feed Conveyor | Belt Motion
Belt Speed 0.75 [m/s] I Geometries 创建Rectangular Surface J Geometries ﹂Rectangular Surface <01>
Rectangular Surface Name Regular Feed Center Coordinates -0.05, 1.6, 3.2 [m] 长度 0.7 [m] 宽度 0.55 [m] Orientation Angles ⯆ 旋转 310, 0, 0 [dega] 提示: 有关设置进料传送带的更多信息,请参阅教程06-高压辊磨机(HPGR)。
在Data面板的Geometries下,右键单击Regular Feed,然后单击Duplicate。
使用下表中的信息定义新的Regular Feed <01>组件。
步骤 数据实体 编辑器位置 参数或操作 设置 K Geometries ﹂Regular Feed <01>
Rectangular Surface Name Surge Feed Center Coordinates -0.05, 1.6, 3.75 [m] 旋转 50, 0, 0 [dega]
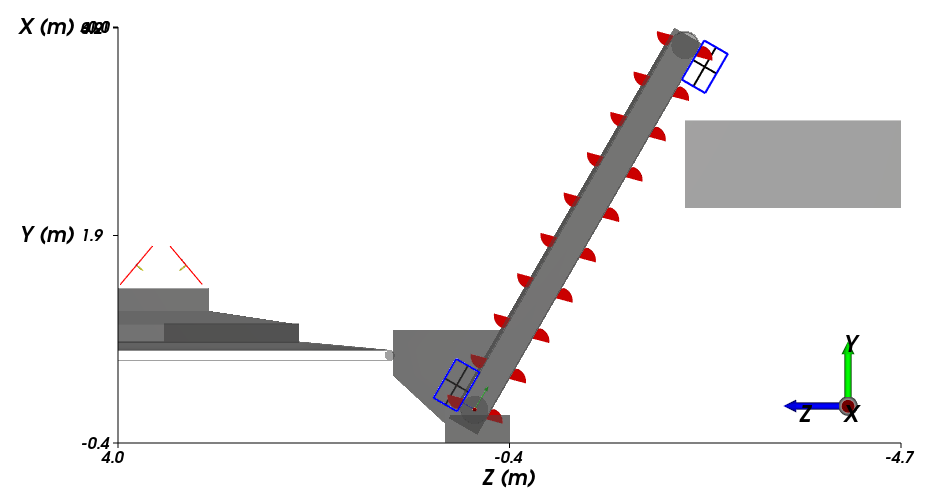
现在所有的几何结构都包含在您的项目中,您可以在3D View窗口中进行可视化。
将单个铲斗的几何结构转换为满载的20斗输送机涉及以下步骤:
(1) 使用单个运动坐标系定义单个铲斗 在输送机上和周围移动的复杂运动。
(2) 该坐标系启用了周期性运动,这使得整个运动集能够以规定的间隔重复。
(3) 将运动坐标系分配给铲斗几何结构。
(4) 然后指示Rocky沿运动路径以固定间隔重复几何结构 (包括其分配的运动)20次。
在Motion Frames步骤中,我们将通过创建具有四个独立运动的单个坐标系来完成上述前两个步骤,如下所述。
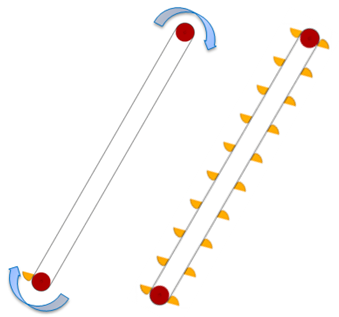
复杂的铲斗运动可以在单个坐标系上使用四个独立的运动来定义:
正面向上的铲斗在输送机的前侧向上移动的平移运动。
铲斗在输送机顶部拱起并翻转的旋转运动。
倒置的铲斗在输送机后侧向下移动 的平移运动。
倒置的铲斗在输送机底部拱起 并再次翻转回正立的旋转运动。
第四个运动使铲斗回到起点,因此要保持铲斗移动,必须重复整个四部分运动集。
在Rocky中,这种运动重复是通过Periodic Motions来完成的。
坐标系中的四个独立运动将使用铲斗速度和传动带长度来定义。
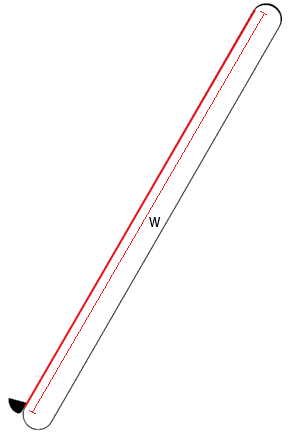
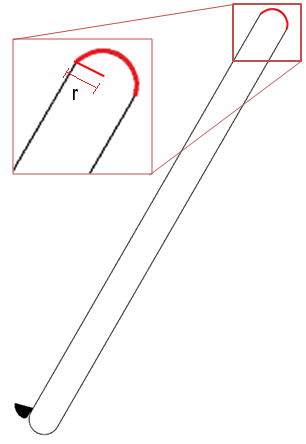
重要: 请注意,整个铲斗运动包括两条直线路径和两条曲线路径。
铲斗速度:1.15 m/s
直线路径的长度(w):4.66174m
曲线路径的半径(r):0.15999m
铲斗完成直线路径需要4.05368 s,完成曲线路径需要0.43706 s
利用这些信息,我们可以确定一次完整的旋转需要8.98148 s。
注意: 该值在稍后设置Periodic Motions和Geometry Replications时都很重要。
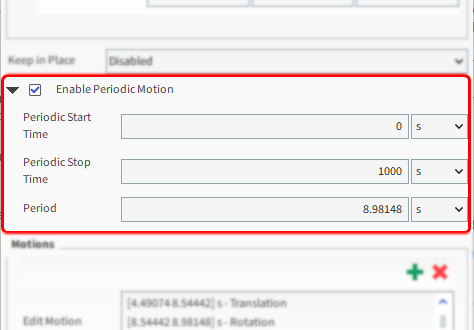
当为某一坐标系启用Enable Periodic Motion时,该坐标系中包含的完整运动列表将在Periodic Motion Period完成后立即重复。
最早运动的Start Time(在本例中为0 s)和最后运动的Stop Time(在本例中为8.98148 s)之间的总时间在Rocky中保存为周期性运动周期。
由于我们希望在最后一个运动结束后立即重复运动,因此我们将Periodic Motion Period 设置为等于运动总时间。
坐标系中包含的完整运动列表将重复,直到达到Periodic Stop Time。
现在您对周期性运动有了更多的了解,您可以创建包含四个独立铲斗运动的单个运动坐标系。
使用下表中的信息定义此运动坐标系,并将其分配给铲斗几何结构。
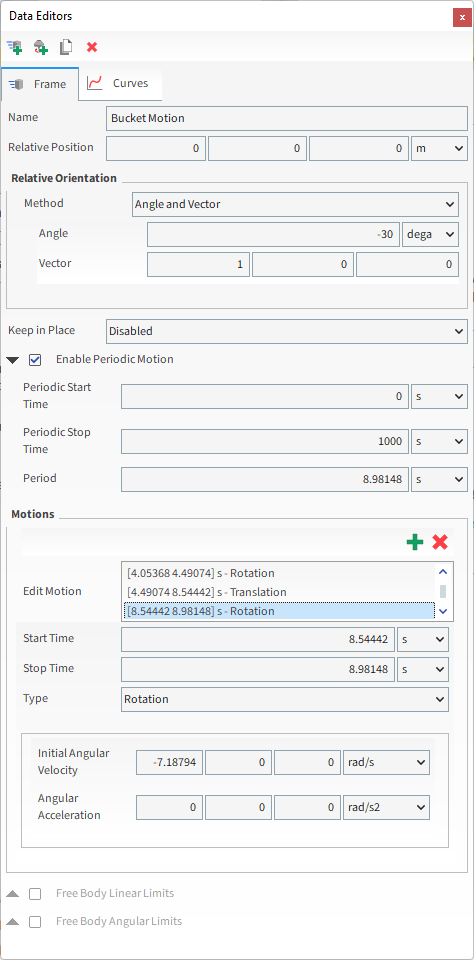
步骤 数据实体 编辑器位置 参数或操作 设置 A Motion Frames Create Motion Frame B Motion Frames ﹂Frame <01>
Frame Name Bucket Motion Relative Orientation | Angle -30 [dega] Enable Periodic Motion (已启用) 周期 8.98148 [s] 添加运动 停止时间 4.05368 [s] 速度 0, 1.15, 0 [m/s] C Motion Frames ﹂Bucket Motion
Frame 添加运动(4项中的第2项) 开始时间 4.05368 [s] 停止时间 4.49074 [s] 类型 Rotation ⯆ Initial Angular Velocity -7.18794, 0, 0 [rad/s] 添加运动(4项中的第3项) 开始时间 4.49074 [s] 停止时间 8.54442 [s] 速度 0, 1.15, 0 [m/s] 添加运动(4项中的第4项) 开始时间 8.54442 [s] 停止时间 8.98148 [s] 类型 Rotation ⯆ Initial Angular Velocity -7.18794, 0, 0 [rad/s] D Geometries ﹂Bucket
壁面 Motion Frame Bucket Motion ⯆
完成的运动坐标系设置现在应该与下图相似。
在本教程中,由于几何结构已分配了带位移的运动,因此可以使用Motion Preview窗口预览该运动。
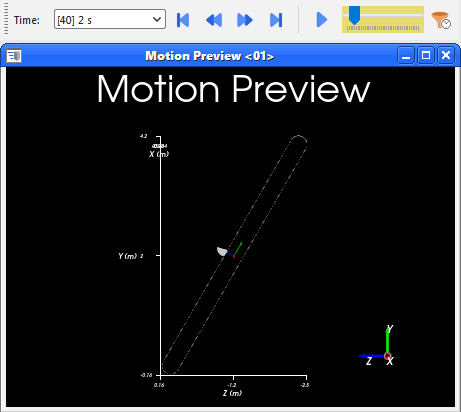
提示: 使用Data面板上的眼图标从视图中隐藏除Bucket 和Belt组件之外的所有组件。
稍后在本教程的第二部分中,我们将使用移动立方体分别分析两个铲斗。
注意: 移动立方体是Cube User Process的定义,并为其分配了一个运动坐标系。
在处理任何仿真之前,必须先创建运动。
按照下表中的步骤创建第二个运动坐标系。
| 步骤 | 数据实体 | 编辑器位置 | 参数或操作 | 设置 |
|---|---|---|---|---|
| A | Motion Frames ﹂Bucket Motion | 复制Motion Frame | ||
| B | Motion Frames ﹂Bucket Motion <01> | Frame | 相对位置 | 0, 4.04, -2.33 [m] |
| Relative Orientation | Angle | -210 [dega] | |||
在本教程中,将为铲斗几何结构激活Replicate Geometry选项,该选项将沿运动路径以指定间隔创建几何结构(及其分配的运动)的副本。
在Data面板的Geometries下,选择Bucket。
在Data Editors面板中,选择Wall | Replication选项卡,然后启用Replicate Geometry复选框。
定义Number of Replications值。
启用Periodic Replication复选框。
要使铲斗出现在正确的位置,请为Replication Period输入完整的周期性运动周期(8.98148 s)。
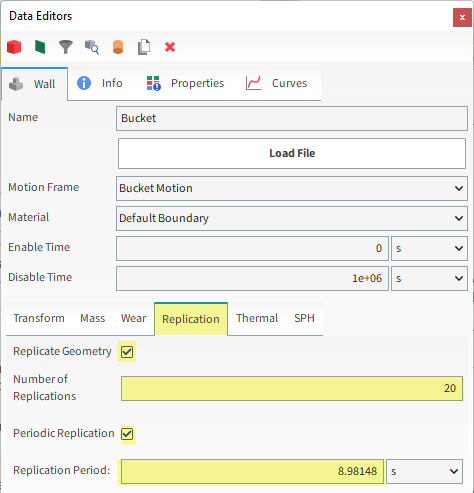
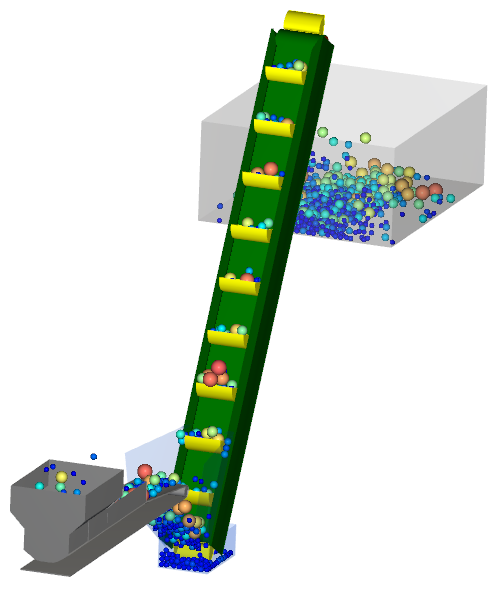
结果如下所示。
如Motion Preview(和/或3D View)窗口所示,单个铲斗现在已被复制为沿铲斗运动路径均匀间隔的20个铲斗。
在Materials步骤中,所有三种默认材料都将使用默认值。
我们将在Materials Interactions步骤中对摩擦值稍作修改。
在Particles步骤中,我们将创建一个新的球形颗粒组,其尺寸在一定范围内,并增加一些滚动阻力。
使用下表中的信息继续设置您的项目。
步骤 数据实体 编辑器位置 参数或操作 设置 A Materials Interactions … | Default Particles⯆
Default Boundary⯆
Static Friction 0.5 [ - ] Dynamic Friction 0.5 [ - ] B 微粒 Create Particle C 微粒 ﹂Particle <01>
Particle | Size 添加尺寸行(x1) (1) Size | Cumulative % 0.15 [m] @ 100 [%] (2) ... 0.05 [m] @ 10 [%] Particle | Movement Rolling Resistance 0.4 [ - ]
在Inlets and Outlets步骤中,我们将创建两个颗粒入口:一个为输送机提供恒定进料,另一个通过入口提供额外的材料涌流。
使用下表中的信息来创建第一个入口,表示常规进料。
步骤 数据实体 编辑器位置 参数或操作 设置 A Inlets and Outlets Create Particle Inlet B Inlets and Outlets ﹂Particle Inlet <01>
Particle Inlet Name Regular Injection Entry Point Regular Feed ⯆ Particle Inlet | Particles 添加行(x1) (1) Particle | Mass Flow Rate Particle <01> ⯆ @ 70 [t/h]
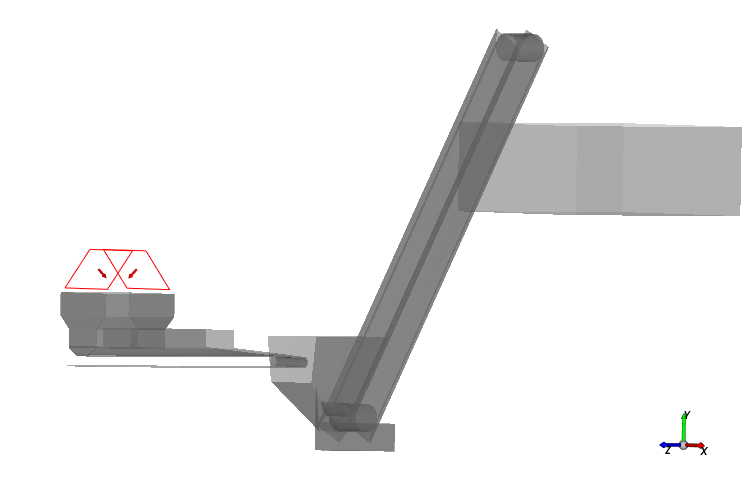
对于第二个入口,我们希望材料浪涌由每5秒出现一次的材料喷涌来表示,从仿真开始后的5秒起(如图所示)。
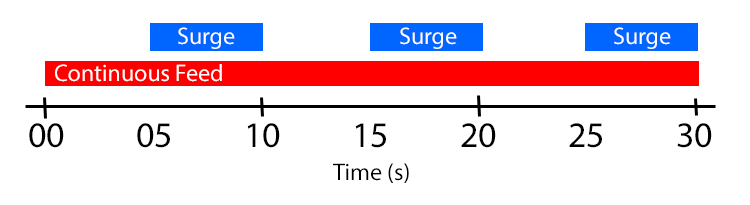
为了复制材料浪涌,我们将把第二个Particle Inlet设置为Periodic注入,这将使颗粒能够从入口点喷射而出。
这些喷涌是通过以下参数定义的:
Period:定义每个注入周期的时间长度。
Injection Duration:定义每个周期内主动释放颗粒的时间量。
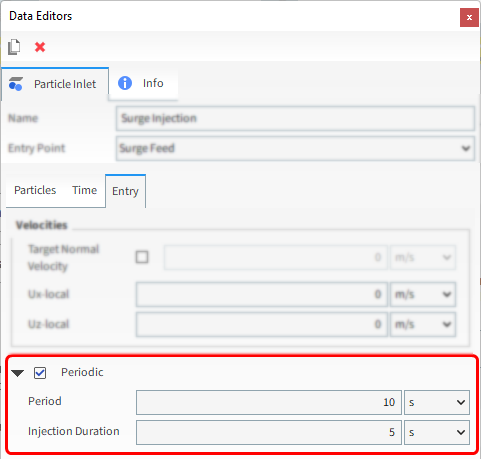
Rocky通过将总颗粒质量除以仿真期间的喷涌总数,来计算每个周期性喷涌中释放的颗粒质量。
使用下表中的信息为材料浪涌创建第二个颗粒入口,并完成仿真设置。
步骤 数据实体 编辑器位置 参数或操作 设置 A Inlets and Outlets Create Particle Inlet B 输入 ﹂Particle Inlet <01>
Particle Inlet Name Surge Injection Entry Point Surge Feed ⯆ Particle Inlet | Particles 添加行(x1) (1) Particle | Mass Flow Rate Particle <01> ⯆ @ 40 [t/h] … | Time 启动 5 [s] … | Entry Periodic (已启用) Periodic | Period 10 [s] Periodic | Injection Duration 5 [s] C 求解器 Solver | Time Simulation Duration 30 [s] Solver | General Simulation Target CPU ⯆
从Solver实体点击Start。
会出现Simulation Summary界面,然后开始处理。
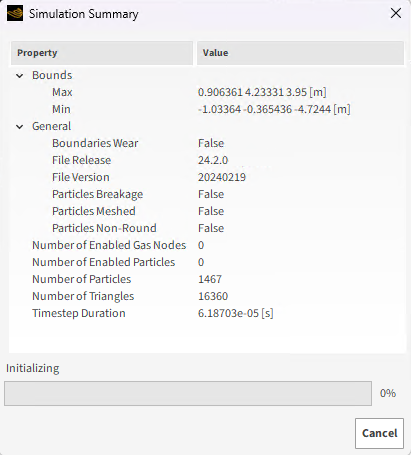
提示: 您可以使用Auto Refresh复选框,以便在处理过程中在3D View窗口中查看结果。
本教程的目的是分析我们在第一部分中处理的斗式输送机仿真的结果。
您将了解如何:
可视化两次独立的注入
评估浪涌期间的质量流
评估已达到稳定状态的每个铲斗的质量载荷
分析颗粒倒入料斗的轨迹
您将使用这些功能:
3D视图
用户进程(立方体、颗粒轨迹)
时间图和自定义公式
重要: 本高级教程包含的细节、截图和步骤比其他Rocky教程要少。
高级教程主要面向的用户不仅更熟悉Rocky用户界面(UI),而且已经非常了解常见设置和后处理任务。
如果您还未达到这种熟悉程度,建议您在开始本教程之前至少先完成教程01~05。
如果您已完成本教程的第一部分,请确保Rocky项目是打开的。(第二部分将从第一部分终止的地方继续。)
如果您没有完成第一部分,请执行以下所有操作:
在此处 下载
dem_tut10_files.zip文件。将
dem_tut10_files.zip解压缩到您的工作目录。打开Rocky 2025 R1。
重要: 要使用提供的Rocky项目文件,必须要有Rocky 2025 R1或更高版本。如果您有较早版本的Rocky,请将Rocky升级到最新版本或从头完成第一部分。
在Rocky程序中,单击Open Project按钮,找到dem_tut10_files文件夹,然后从tutorial_10_A_pre-processing文件夹中打开tutorial_10_A_pre-processing.rocky文件。
处理仿真。(从Data面板中选择Solver,然后从Data Editors面板中点击Start按钮。)
现在我们的项目已经完成处理,我们可以开始分析结果了。
让我们首先查看每个独立入口的贡献。
从Data面板中,选择Particles。
在Data Editors面板的Properties选项卡上,右键单击Particle Boundary,指向3D View,然后单击Show in new 3D View。
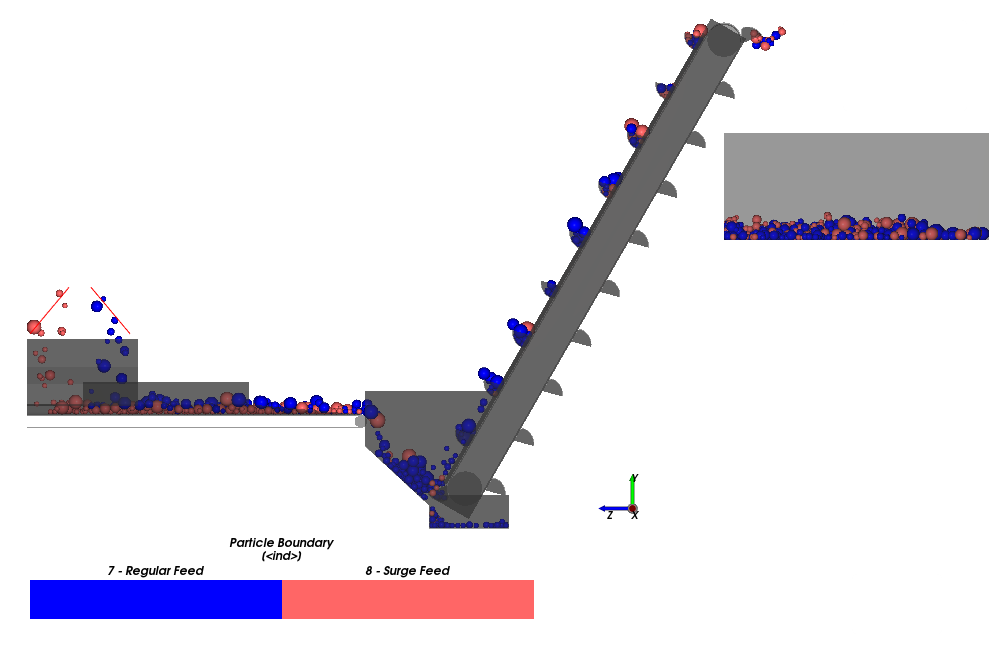
每个入口的贡献都用不同的颜色表示。
注意: 颗粒边界按照添加到Geometries实体的顺序从零开始编号。
提示: 使用Time工具栏上的滑块查看不同时间的浪涌。
评估浪涌影响的另一种方法是绘制颗粒计数图。
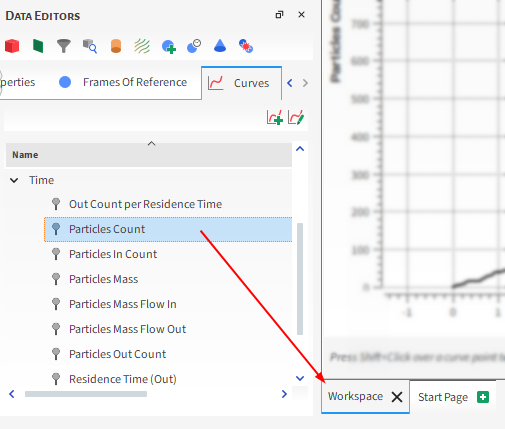
从Data面板中,再次选择Particles。
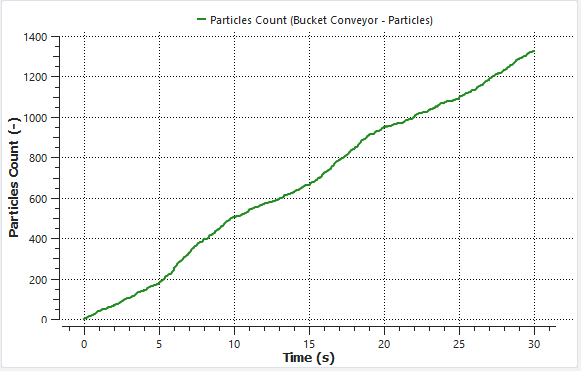
在Data Editors面板的Curves选项卡上,将Particles Count拖放到Workspace上。
绘制出的曲线图显示,当浪涌导致质量流增加时,曲线会更陡。
我们还可以通过Particle Boundary属性过滤颗粒,并分别绘制每个入口的颗粒计数图。
首先,我们将分离出由常规进料产生的颗粒。
使用下表中的信息开始此分析。
步骤 数据实体 编辑器位置 参数或操作 设置 A 微粒 创建一个过滤器用户进程 B User Processes ﹂Filter <01>
Property Name Regular Feed Particles Property Particle Boundary ⯆ 类型 值 Cut value 7 [<ind>] 接下来,我们将分离出由浪涌进料产生的颗粒。
在Data面板的User Processes下,右键单击Regular Feed Particles,然后单击Duplicate。
使用下表中的信息定义新创建的Regular Feed Particles <01>项。
步骤 数据实体 编辑器位置 参数或操作 设置 A User Processes ﹂Regular Feed Particles <01>
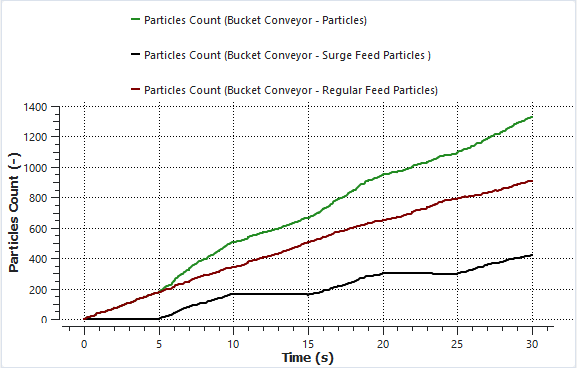
Property Name Surge Feed Particles Cut value 8 [<ind>] 现在,在Data面板的User Processes下,多选Regular Feed Particles和Surge Feed Particles。
将这两个进程拖放到之前的图上。
结果图显示了另外两条曲线:
浪涌进料由一条“阶梯”曲线表示,该曲线显示了不同时间段的注入。
常规进料由一条以恒定速率增长的曲线表示。
接下来,让我们评估输送效率。
这可以通过使用两个移动立方体(每个立方体代表一个铲斗)和一个时间图来分析每个铲斗所携带的颗粒质量来完成。
我们将使用我们在第一部分中创建的运动坐标系来描述立方体的运动。
使用下表中的信息创建移动立方体。
步骤 数据实体 编辑器位置 参数或操作 设置 A 微粒 创建一个Cube User Process B User Processes ﹂Cube <01>
立方体(Cube) Motion Frame Bucket Motion ⯆ Center -0.06, 0.27, 0.2 [m] Magnitude 0.5, 0.5, 0.3 [m] Orientation | Method Angles ⯆ Orientation | Rotation -30, 0, 0 [m] C User Processes ﹂Cube <01>
复制Cube用户进程 D User Processes ﹂Cube <02>
立方体(Cube) Motion Frame Bucket Motion <01> ⯆ Center -0.06, 3.8, -2.55 [m]
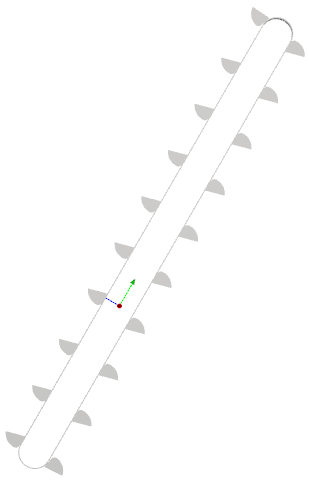
这将产生两个立方体,包含两个铲斗(如图所示)。
由于分配了运动坐标系,因此这两个立方体将在整个仿真过程中伴随铲斗(在Motion Preview中查看,并在铲斗壁可见的情况下多选两个立方体)。
现在我们有了立方体选择,可以用它来创建一个时间图,显示两个铲斗的颗粒质量之和。
使用下表中的信息创建时间图。
步骤 项 位置 参数或操作 设置 A Window(菜单) 创建一个New Time Plot B Cube <01> Properties | Particle Mass 拖放到Time Plot窗口上 C Select the Statistics to Plot(对话框) 总和 (已启用) (所有其他项) (已清除) D Cube <02> Properties | Particle Mass 拖放到Time Plot窗口上 E Select the Statistic to Plot(对话框) 总和 (已启用) (所有其他项) (已清除)
生成的图表示每个立方体区域中的颗粒质量。
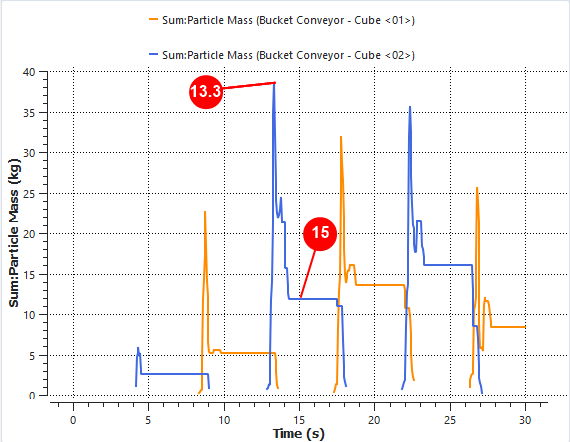
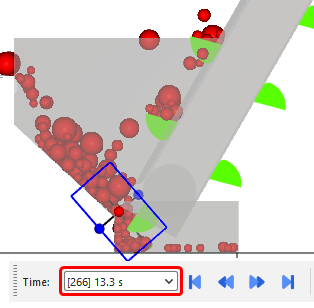
注意: 我们正在分析的每个铲斗都会通过料斗3次。
请注意,当穿过料斗时(例如在13.3 s时),立方体包含的颗粒不一定由铲斗携带,这会在图上产生峰值。
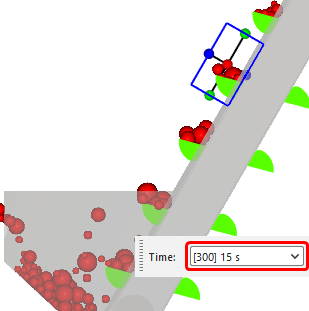
当立方体内的所有颗粒都由铲斗携带时(15 s),相关值在图中保持恒定一秒钟以上。(比较所示图像。)
铲斗携带的颗粒质量在2.6 kg(开始时,料斗上的颗粒很少)和16 kg之间变化。
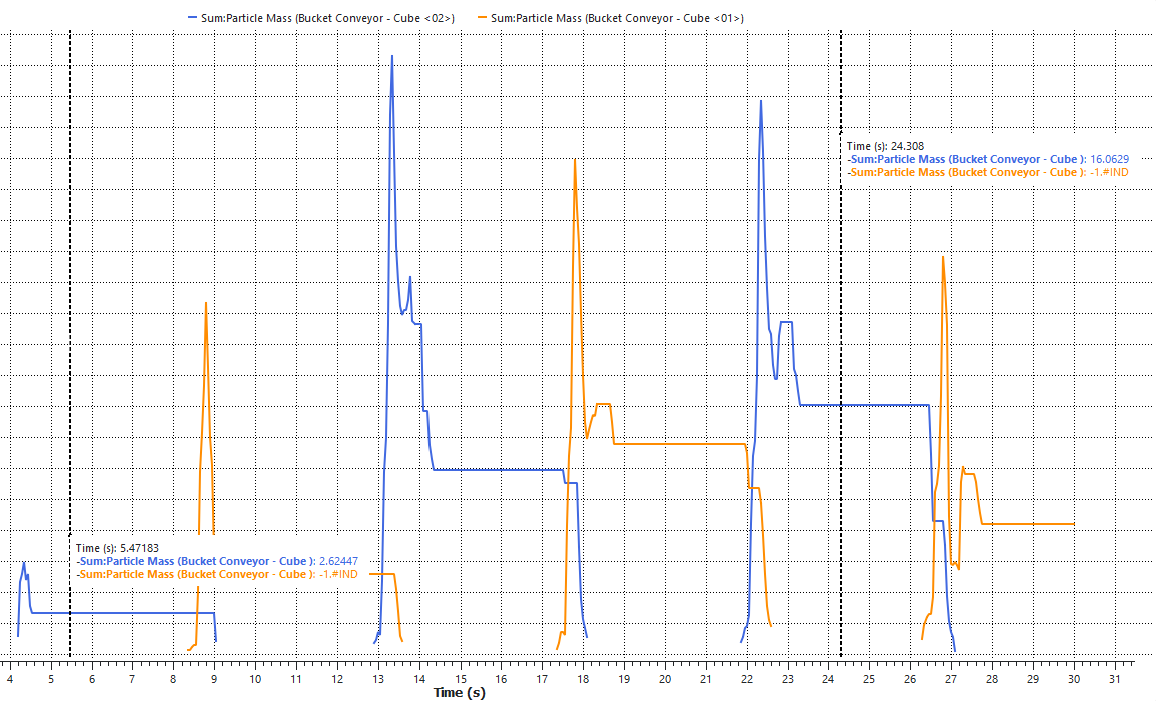
注意: 您的值可能与本教程中提供的值略有不同。
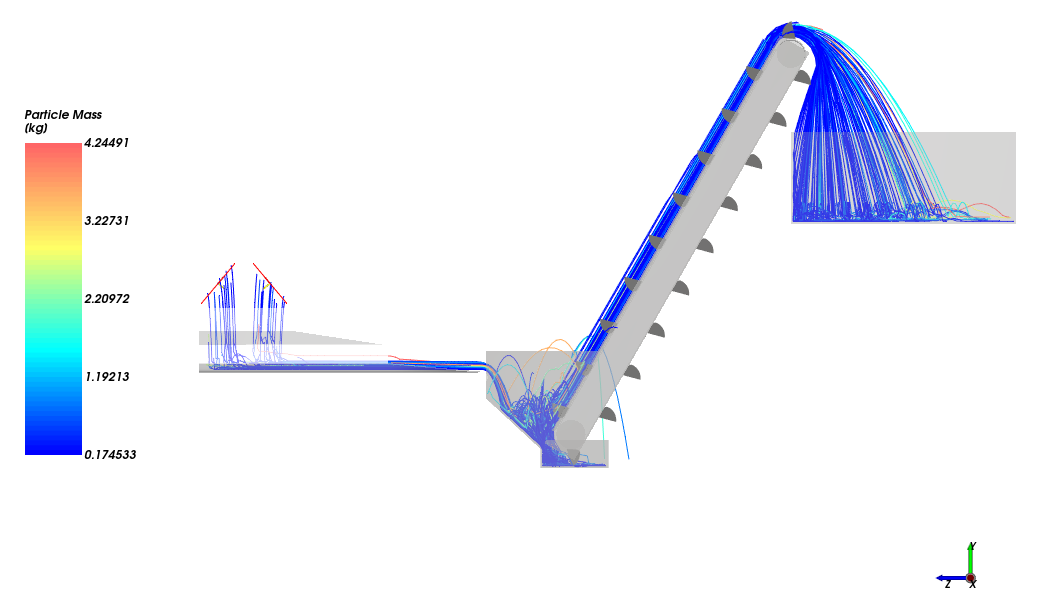
我们可以用该项目进行的另一个分析涉及使用Particles Trajectory User Process,它通过将颗粒的运动转换为3D曲线来显示颗粒的路径。
要可视化颗粒的轨迹,请执行以下操作:
在Time工具栏中,确保已选择[120] 6 s时间步。这将是您的起始时间步。
使用下表中的信息创建颗粒轨迹。
步骤 数据实体 编辑器位置 参数或操作 设置 A 微粒 创建一个Particles Trajectory User Process B User Processes ﹂Particles Trajectory <01>
Particle Trajectory 间隔数 300 [ - ] Particle Stride 1 [ - ] Update Particles Selection 您的起始时间步值应相应更新。
要查看轨迹,请使用下表中的信息。
步骤 项 位置 参数或操作 设置 A Window(菜单) 创建一个New 3D View B User Processes | Particles Trajectory <01>
着色 Visible (已启用) Edges (已启用) Edges | Property Particle Mass ⯆
提示: 使用其Data面板眼图标从视图中隐藏颗粒。