


As shown in the figure below, the result record function defines whether to record the stress and strain result of an EasyFlex body or FE body. And you can also decide whether to record other results such as Constraints, Forces, EHD bearing, Motor EM force, Contacts, Sub-entities and Write to out file. The result file size can be reduced by skipping to record of some unnecessary results. The parameters are described in the table below.
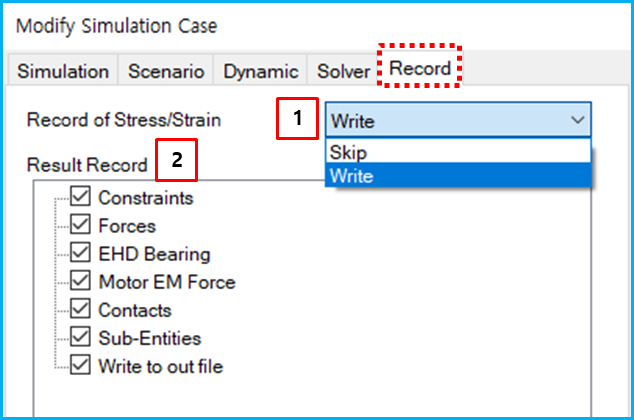
Figure 9.42: Record parameters in the simulation configuration
| Feature | Description | Dimension (Range) |
| 1. Record of Stress/Strain |
Use to decide whether to record the stress and strain result of an EasyFlex body or FE body. The result file size can be reduced by selecting to skip to record of stress and strain result. | N/A |
| 2. Result Record | Use to select record results such as Constraints, Forces, EHD bearing, Motor EM force, Contacts, Sub-entities and Write to out file. | N/A |
The selectable entities to record are described in the figure and table below.
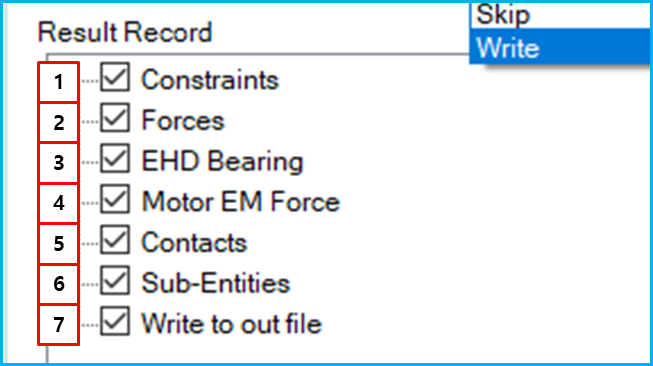
Figure 9.44: Record entity list
| Feature | Description | Dimension (Range) |
| 1. Constraints | Revolute, Translational, Fixed, Ball, Cylindrical, Plane, Distance, Universal, Screw, Constant Velocity, Orientation, Parallel, Inline, Inplane, Perpendicular, Coupler, Gear, Rack and Pinion, Cable, PTCV, CVCV, BC, EF BC, EF RBE Single, EF RBE Pair. | N/A |
| 2. Forces | Spring, R-Spring, Bushing, Matrix, T-Scalar, R-Scalar, Vector, C-Load, PLoad, Tire, General Bearing, EF PLoad, EF CLoad, EF Range, Car Bump Stop, Car Bush, Car Damper, Car Rebound Stop, Car Spring. | N/A |
| 3. EHD Bearing | EHD Bearing | N/A |
| 4. Motor EM Force | Motor EM Force | N/A |
| 5. Contacts | General Contact, RtoR 3D, RtoF3D, FtoF3D, Sphere to Multi-Curve, Cylinder to Multi-Curve, Multi-Curve to Multi-Curve, Tie, EF Tie, EF Weld | N/A |
| 6. Sub-Entities | Function Expression, User-subroutine, Variable Equation, First Order Differential Equation, Second Order Differential Equation | N/A |
| 7. Out File |
Force: General Bearing, Request: Structural Request, Kinematic Request, Sub-Entity:Function, User Subroutine, Links: Chained System, Tracked System, Ball Placing Contact, Soil Interaction, Massless Track Link, Thrust Force, Hydro Force, Drivetrain: ShaftSet, GearSet, Bearing, Assembly Manager, EHD Bearing, EM Force, Car: Bumpstop, Reboundstop. | N/A |