


When modeling a mechanical system, it is possible to define multiple conditions
that constrain the model in exactly the same way. In this case, the identical DOF
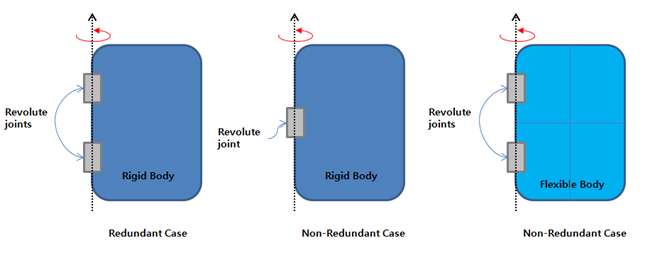
constraints are removed from the model. For example, when modeling a door system,
you may add two revolute joints to restrict the door motion as shown in the figure
below. If the body is modeled as a rigid body, the set of constraint equations from
the second joint is redundant. In this case, that set constraint equations is
ignored in all Motion Solver calculations. Therefore, if you require a reaction
force at the redundant constraint, it must be modeled using a force entity such as a
Bushing. If the body is modeled as a flexible body, the
constraint equations of the joints are not redundant. The information for the
redundant constraint is written in the message file (*.msg)
during each analysis (such as position, velocity, acceleration, and dynamics
analysis).
To avoid the redundant constraint problem, you can try to find a single constraint that removes all the DOFs as required.