


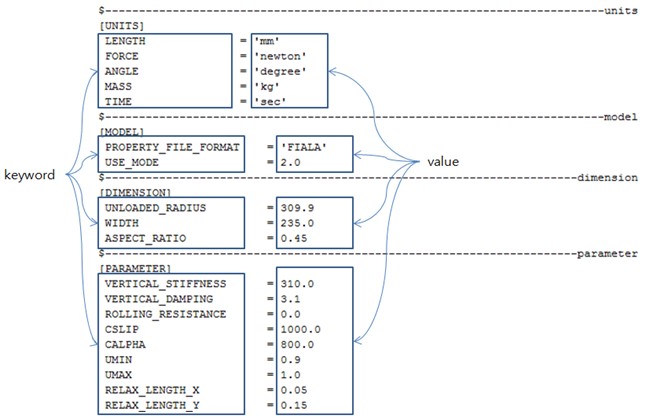
Tire properties are defined in a TIR file as shown in the figure above. The file is written in text format and contains keywords and values. The available keywords are shown in the table below. The keywords related to a unit system are used as the conversion factor when a value is converted into the model unit system. This chapter will introduce the parameters for FIALA, UA, and PULLING tires. For the other types, you can refer the sample TIR file for each tire type from the installed example folder.
Figure 6.72: Keywords for all tires in a TIR file
| Keyword | Description | Dimension |
| LENGTH |
Use to set the length unit system. The available length units are as follows. Micrometer = Millimeter = Meter = Kilometer = |
N/A (Character) |
| FORCE |
Use to set the force unit system. The available force units are as follows. MiliNewton = Newton = KiloNewton = |
N/A (Character) |
| ANGLE |
Use to set the angle unit system. The available angle units are as follows. Radian = Degree = |
N/A (Character) |
| MASS |
Use to set the mass unit system. The available mass units are as follows. Miligram = Gram = Kilogram = Ton = |
N/A (Character) |
| TIME |
Use to set the time unit system. The available time units are as follows. Millisecond = Second = |
N/A (Character) |
| PROPERTY_FILE_FORMAT | Use to select the tire type. The fiala,
ua, mf,
ftire, swift,
pul and pac types
are available. The poly_line and
sine_sweep road types are only available
with FTire tires. The related parameters for each tire are
introduced in Figure 6.73: Keywords for FIALA, UA and PUL in a TIR file. |
N/A (Character) |
| USE_MODE | Use to set the formula type for MF-Tyre or MF-Swift tires. This is only
available for MF-Tyre and MF-Swift. For the other types, this
value must be set to 2.0. | N/A |
Figure 6.73: Keywords for FIALA, UA and PUL in a TIR file
| Keyword | Description | Available Tire | Dimension |
| UNLOADED_RADIUS | Use to set the unloaded tire radius. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
Length (Real>0) |
| WIDTH | Use to set the tire width. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
Length (Real>0) |
| ASPECT_RATIO | Use to set the aspect ratio. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
% (Real>0) |
| VERTICAL_STIFFNESS | Use to set the vertical stiffness. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
Force/Length (Real>=0) |
| VERTICAL_DAMPING | Use to set the vertical damping coefficient. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
Force*Time/Length (Real>=0) |
| ROLLING_RESISTANCE | Use to set the rolling resistance. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
Length (Real>=0) |
| CSLIP | Use to set the longitudinal slip coefficient. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
Force (Real>=0) |
| CALPHA | Use to set the cornering stiffness for the slip angle. For more information on usage, refer to Tire Force. | FIALA, UA |
Force/Angle (Real>=0) |
| CGAMMA | Use to set another cornering stiffness to consider comprehensive slip. The tire force can consider the effect of the camber angle with this value. | UA |
Force/Angle (Real>=0) |
| UMIN | Use to set the minimum friction coefficient. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
N/A (Real>=0) |
| UMAX | Use to set the maximum friction coefficient. For more information on usage, refer to Tire Force. | FIALA, UA, PULLING |
N/A (Real>=0) |
Tire force can be scaled or shifted under the inclination condition. A Motion Tire object supports parameters to consider these conditions as shown in the table above. These parameters are available for all tire types and the tire force and torque at the contact point can be recalculated using the following equations.
 | (6–2) |
 | (6–3) |
 | (6–4) |
where, the  ,
,  and
and  are original lateral force, aligning torque,
and overturning moment at the contact point, respectively.
are original lateral force, aligning torque,
and overturning moment at the contact point, respectively.  and
and  are the lateral force and aligning torque
offsets due to the ply steer of tire, respectively.
are the lateral force and aligning torque
offsets due to the ply steer of tire, respectively.  and
and  are the lateral force and aligning torque
offsets due to the conicity of tire, respectively.
are the lateral force and aligning torque
offsets due to the conicity of tire, respectively.  ,
,  and
and  are the scale factors for the lateral force,
aligning torque and overturning moment.
are the scale factors for the lateral force,
aligning torque and overturning moment.
Figure 6.74: Keywords for scale factor and offset in a TIR file
| Keyword | Description | Dimension |
| CONICITY_FORCE_OFFSET | Use to set the lateral force offset due to conicity. |
Force (Real) |
| CONICITY_TORQUE_OFFSET | Use to set the aligning torque offset due to conicity. |
Force*Length (Real) |
| PLYSTEER_FORCE_OFFSET | Use to set the lateral force offset due to ply steer. |
Force (Real) |
| PLYSTEER_TORQUE_OFFSET | Use to set the aligning torque offset due to ply steer. |
N/A (Real) |
| LATERAL_FORCE_SCALE | Use to set the scale factor for lateral force. |
N/A (Real) |
| ALIGNING_TORQUE_SCALE | Use to set the scale factor for aligning torque. |
N/A (Real) |
| OVERTURNING_MOMENT_SCALE | Use to set the scale factor for overturning moment. |
N/A (Real) |
A Motion Tire object also supports a simple PUL tire formula to
realize a tire under inclination. The vertical force, longitudinal force and rolling
resistance moment are calculated using the same formulas as for a FIALA tire, but
the lateral force and aligning moment are computed with parameters for the slip
angle  as shown in the figure
and table below.
as shown in the figure
and table below.
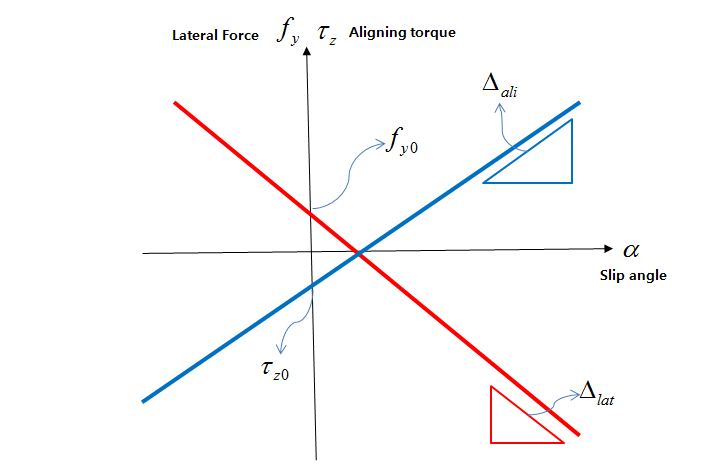
As shown in the figure above, the lateral force and aligning torque can be calculated by a
linear interpolation of the slip angle. The x and y axes are the slip angle and
lateral force or aligning moment, respectively.  and
and  are the intercept for the lateral force and
aligning torque, respectively.
are the intercept for the lateral force and
aligning torque, respectively.  and
and  are the slope for lateral
force and aligning torque, respectively.
are the slope for lateral
force and aligning torque, respectively.
Figure 6.76: Keywords for a PUL tire in a TIR file
| Keyword | Description | Dimension |
| FY_GRADIENT | Use to set the slope for the lateral force. |
N/A (Real) |
| FY_INTERCEPT | Use to set the intercept for the lateral force. |
Force (Real) |
| TZ_GRADIENT | Use to set the slope for the aligning torque. |
N/A (Real) |
| TZ_INTERCEPT | Use to set the intercept for the aligning torque. |
Force*Length (Real) |