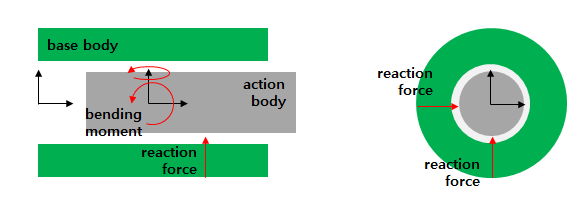
The translational friction force of a cylindrical joint is very similar to that of transitional joint. The formulas of friction forces by pre-defined friction force, reaction force, and bending moment are therefore the same as those for a translational joint. However, the cylindrical joint doesn't support friction force by torsional moment because the joint allows rotational motion of the action body relative to the z-axis of the base marker and there is no torsional moment.