


For a given set of environmental conditions in a Stability Analysis, it is sometimes possible for there to be more than one solution in which the forces acting on the system are equilibrated.
Consider a symmetric vessel, anchored at the bow, in a beam sea: the wave forces on the vessel become more balanced whether the vessel swings towards the direction of the wave, or away from the direction of the wave, as shown in Figure 5.11: Possible Equilibrium Positions.
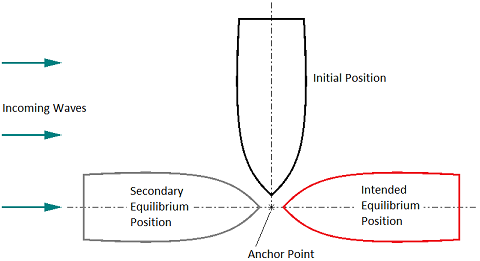
There is usually a preferred state that should be used as the starting condition for a subsequent Frequency Statistical Analysis or Time Response Analysis. In the case above, it is expected that the bow of the vessel points toward the incoming waves. Due to the iterative method used by Aqwa to determine equilibrium position, it is not always possible to predict which equilibrium position the solution will converge towards.
To encourage convergence towards the expected equilibrium position, you may add a Starting Position object to define the initial position of a structure (or group of articulated structures) for the first iterative step of a Stability Analysis.
A Starting Position allows you to set translational or rotational offsets about a selected reference point on a structure. The offsets may be relative to the initial geometric position of the structure (as defined in the original CAD geometry), or relative to an existing Fixed Point; alternatively, the absolute position of the reference point may be set directly.
To insert a Starting Position:
Select the Hydrodynamic Response object in the tree view.
Right-click on the Hydrodynamic Response object and select Insert > Starting Position, or click on the Starting Position icon in the Analysis toolbar.
It is only possible to include a Starting Position object when the Computation Type is set to , or when the Computation Type is set to and the Starting Position option is set to or .
Select a Structure to which the Starting Position should be attached. The Reference Point must be a Connection Point attached to the selected structure.
Selecting a Reference Point automatically populates the Position X, Position Y, and Position Z fields with the absolute position of the selected Connection Point.
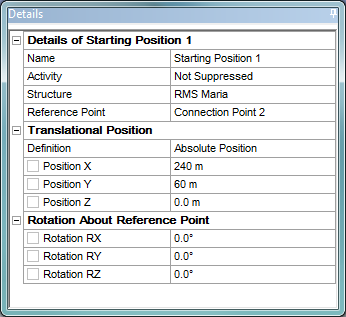
The Definition field of Translational Position can be set to , , or .
Modifying the absolute Position X, Y, and Z applies a translation to the position of the selected Reference Point in the Fixed Reference Axes (FRA).
Changing the Definition field to displays the Relative Position X, Relative Position Y, and Relative Position Z fields. Varying the Relative Position X, Y, and Z in this mode applies a translation to the position of the selected reference point in an axis system whose origin lies at the original position of the reference point, and whose axes lie parallel to the Fixed Reference Axes (FRA).
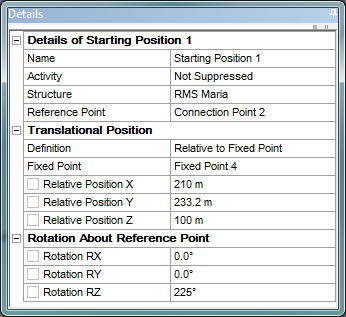
Changing the Definition field to displays the Fixed Point field, which allows you to select an existing Fixed Point from the Geometry. In this mode, the Relative Position X, Y, and Z are defined in an axis system whose origin lies at the position of the selected Fixed Point, and whose axes lie parallel to the Fixed Reference Axes (FRA).
The Absolute Position or Relative Position X, Y, and Z are initialized with values described in the following table:
| Definition | Initial Values |
|---|---|
| Absolute Position | Current position of Reference Point in FRA |
| Relative to Geometric Position | Difference between current position of Reference Point in FRA and original geometric position of Reference Point in FRA |
| Relative to Fixed Point | Difference between current position of Reference Point in FRA and position of Fixed Point in FRA |
The Rotation About Reference Point fields Rotation RX, Rotation RY, and Rotation RZ allow you to rotate the selected structure about an axis system centered on the selected reference point, and whose axes lie parallel to the Fixed Reference Axes (FRA).
The positions of structures within an articulated group, relative to one another, are not changed by the application of a Starting Position. Translations and rotations due to a Starting Position are applied as if the articulations within that group are rigid.
A Starting Position may only be applied to a structure whose position is not already defined in some way. The Structure field is invalid if the structure is:
Already selected in another Starting Position object.
Connected by a Joint, or sequence of Joints, to a Fixed Point.
Connected by a Joint, or sequence of Joints, to a structure which is already selected in another Starting Position object.
In the latter two cases, if the initial position of the structure needs to be modified, you should instead re-define the Alignment Method of the Joint Axes (see Joints).