


Datum Reference Frame
The Datum Reference Frame (DRF) consists of three mutually perpendicular planes inferred from three Datum Features.
Datum Features that comprise the DRF can be a combination of planes and cylinders.
The DRF is inferred from the Datum Feature References. This does not mean the references have to be three orthogonal planar features.
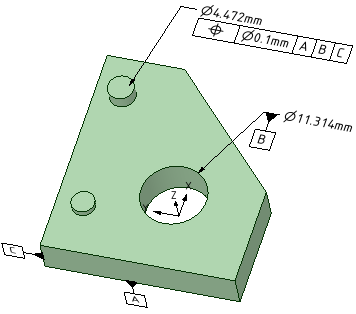
The XYZ coordinate system in the image above is the Datum Reference Frame formed by the three Datum Features A, B, and C.
When you select a DRF in the Structure Tree, it highlights in the Graphics Window. If the DRF has any unconstrained degrees of freedom (DOF), the DRF display in the graphics window is animated to show movement in the unconstrained DOF's.
DOF information is displayed in the Properties panel for a selected DRF. The constraints are established by default rules when the DRF is created. In some cases, you may want to override the defaults. Each Datum of the DRF can have it's constraints modified with a dropdown menu in the Properties panel of the DRF.
Selecting a DRF in the Graphics Window highlights it in the Structure Tree.
The DRF may not be valid if changes have been made to invalidate any of the symbols. Invalid Datum Features are marked with a Red 'X' in the Structure Tree.
You can Delete a DRF by selecting it in the Structure Tree like other SpaceClaim objects.