


The closest point projection based on a smooth boundary implements the node-to-segment projection search algorithm "Inside-Outside test" by Wang et al. [13].
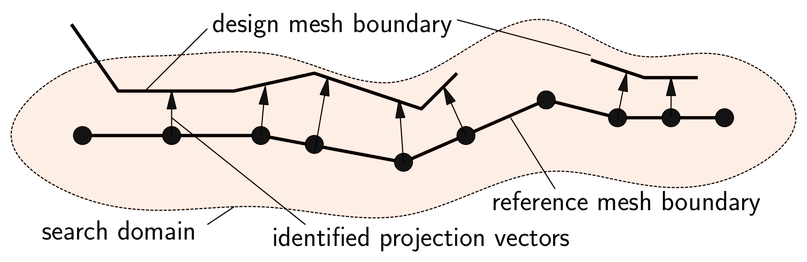
The algorithm first associates each node on the reference mesh boundary with a normal vector. This nodal normal vector is obtained as a weighted average of the normal vectors of the adjacent boundary segments. If the FEM mesh is a volume, the nodal normal vector points outside.
Projection points on the design mesh are found by extending the nodal normal vector in either direction. Along these directions the algorithm searches for intersections with the design mesh’s boundary segments. Only segments within a user-specified maximum search distance are considered. If the intersection search fails, a missing item is created instead. If multiple segments are intersected along the given direction, the segment within the shortest distance is chosen. Only segments equally oriented in space are matched. This means that they point into the same half-space. (The dot product of the reference mesh nodal normal vector and the design mesh boundary segment normal vector is positive.)
With thin-walled structures defined by shell elements, each shell element is associated with two boundary segments (upper and lower side: SPOS and SNEG).
Finally, the actual deviation vector is defined as the vector between the reference node and the intersection point on the design mesh segment. The normal coordinate deviation is the magnitude of this vector. The sign of the normal deviation is positive if the dot product of the deviation vector and the reference mesh’s nodal normal vector is positive.
Features
Requires well defined orientation of shell elements in FEM meshes.
May not detect a projection near certain corner situations.
Can treat holes, overlaps, and cut-offs. It does not identify a projection in such cases.