Most real-world optimization problems include more than one objective and a large number of design variables. This leads to the general formulation of the multi-objective optimization problem
 | (3–7) |
with  as the vector of design variables and the constraints of inequality
as the vector of design variables and the constraints of inequality
 and equality
and equality  . All solutions which comply with both constraints and variable bounds
form the feasible n-dimensional design space. Each solution
x is assigned to a vector
. All solutions which comply with both constraints and variable bounds
form the feasible n-dimensional design space. Each solution
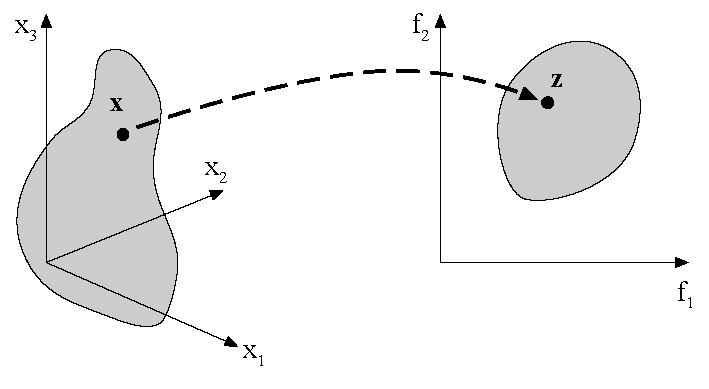
x is assigned to a vector  describing one point of the M -dimensional objective space. This is
the major difference to the single-objective optimization problem where there is only
one objective. The mapping between design space and objective space is illustrated in
Figure 3.15: Design Space (Left) and Objective Space (Right).
describing one point of the M -dimensional objective space. This is
the major difference to the single-objective optimization problem where there is only
one objective. The mapping between design space and objective space is illustrated in
Figure 3.15: Design Space (Left) and Objective Space (Right).
Several procedures have been developed to solve a multi-objective optimization problem (Branke et al. 2008). They are classified in non-interactive and interactive methods. In non-interactive methods the multi-objective optimization problem is transferred into a single-objective problem. This can be done e.g. by choosing a preferred objective function and introducing the remaining objectives as constraints
 | (3–8) |
Another possibility is to combine all objectives in a single function by using individual weights wi
 | (3–9) |
Both methods require good knowledge about the optimization potential with respect to each objective function and a clear idea about the importance of the different objectives with respect to each other.
In early stages of the design process such information are often rare and a transformation of the multi-objective task into a single objective task is not possible a priori. In such cases interactive methods are more promising. In optiSLang Pareto optimization as one of the most popular interactive methods is available.
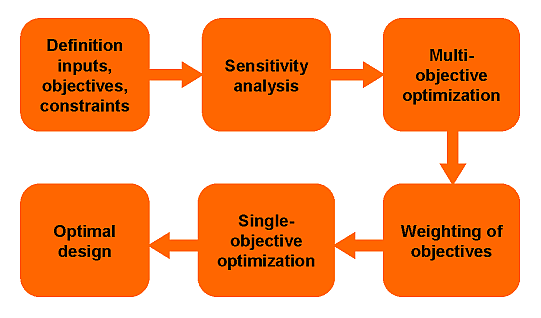
In Figure 3.16: Recommended Flowchart for Multi-Objective Optimization, the recommended flow for a multi-objective optimization procedure is shown: initially the inputs, possible objectives and constraint functions are defined. Sensitivity analysis is used to detect unimportant parameters and to check the objective functions with respect to possible conflicts. Afterwards, a multi-objective optimization is performed to determine the optimization potential within the conflicting objectives and to derive suitable weighting factors for a following single-objective optimization. Finally this single-objective optimization determines an optimal design.