


*INITIAL_VELOCITY_GENERATION
Specifies initial translational and rotational velocities.
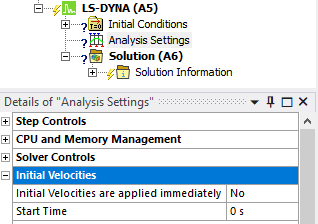
You can apply initial velocities immediately or delay the initial velocity. To delay the initial velocity:
Set Initial Velocities are applied immediately to No in the Initial Velocities section of the Analysis Settings object.
Enter a Start Time. In this case, the LS-DYNA system will write the card *INITIAL_VELOCITY_GENERATION_START_TIME to the input file.
When applying a delayed Initial Velocity to an SPH part, the LS-DYNA system will write two *INITIAL_VELOCITY_GENERATION cards, one with PHASE=0 and one with PHASE=1.
Card1
ID = ID of part where the initial velocity is applied.
STYP = 2, the velocity is applied to a whole part. In Workbench initial velocities can only be applied to whole parts.
OMEGA = angular velocity about the rotational axis.
VX = initial translational velocity in the x direction.
VY = initial translational velocity in the y direction.
VZ = initial translational velocity in the z direction.
IVATN = 0 (default) contact bodies of a multibody part are not assigned the initial velocities of the target part.
ICID = Local coordinate system ID. The specified velocities are in the local system.
Card2
XC = 0. x coordinate of the origin of the applied coordinate system.
YC = 0. y coordinate of the origin of the applied coordinate system.
ZC = 0. z coordinate of the origin of the applied coordinate system.
NX = x-direction cosine.
NY = y-direction cosine.
NZ = z-direction cosine.
PHASE = 0 (default), velocities are applied immediately.
IRIGID = 0: Option to overwrite or automatically set rigid body velocities defined on the *PART_INERTIA and *CONSTRAINED_NODAL_RIGID_BODY _INERTIA cards.
*CHANGE_VELOCITY_GENERATION
Modifies initial translational and rotational velocities in Small and Full Restarts.
Card1
ID = ID of part where the initial velocity is applied.
STYP = 2, the velocity is applied to a whole part. In Workbench initial velocities can only be applied to whole parts.
OMEGA = angular velocity about the rotational axis.
VX = initial translational velocity in the x direction.
VY = initial translational velocity in the y direction.
VZ = initial translational velocity in the z direction.
IVATN = 0 (default) contact bodies of a multibody part are not assigned the initial velocities of the target part.
ICID = Local coordinate system ID. The specified velocities are in the local system.
Card2
XC = 0. x coordinate of the origin of the applied coordinate system.
YC = 0. y coordinate of the origin of the applied coordinate system.
ZC = 0. z coordinate of the origin of the applied coordinate system.
NX = x-direction cosine.
NY = y-direction cosine.
NZ = z-direction cosine.
PHASE = 0 (default), velocities are applied immediately.
IRIGID = 0: Option to overwrite or automatically set rigid body velocities defined on the *PART_INERTIA and *CONSTRAINED_NODAL_RIGID_BODY _INERTIA cards.
*INITIAL_VELOCITY_RIGID_BODY
Specifies initial translational and rotational velocities at the center of gravity for rigid bodies.
Card
PID = ID of the rigid body.
VX = initial translational velocity in the x direction.
VY = initial translational velocity in the y direction.
VZ = initial translational velocity in the z direction.
VXR = initial rotational velocity around the x-axis.
VYR = initial rotational velocity around the y-axis.
VZR = initial rotational velocity around the z-axis.