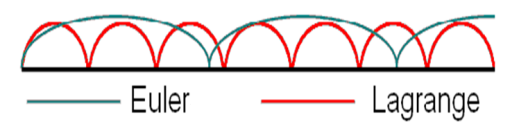
In the Explicit Dynamics system, solid bodies can be assigned either a Lagrangian reference frame or an Eulerian (Virtual) reference frame. The reference frames can be combined in the simulation to allow the best solution technique to be applied to each type of material being modelled. During the simulation, bodies represented in the two reference frames will automatically interact with each other. For example, if one body is filled with steel using a Lagrangian reference frame, and another body filled with water using an Eulerian reference frame, the two bodies will automatically interact with each other if they come into contact. The interaction between Eulerian and Lagrangian bodies provides a capability for tightly coupled two way fluid structure interaction in the Explicit Dynamics system.
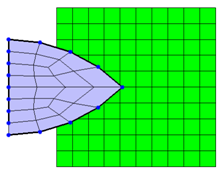
In the simple example below, a body with Lagrangian reference frame (grey) is moving from left to right over a body with Eulerian reference frame. As the body moves, it acts as a moving boundary in the Euler domain by progressively covering volumes and faces in the Euler cells. This induces flow of material in the Euler Domain. At the same time, a stress field will develop in the Euler domain which results in external forces being applied on the moving Lagrangian body. These forces will feedback into the motion and deformation (and stress) of the Lagrangian body.
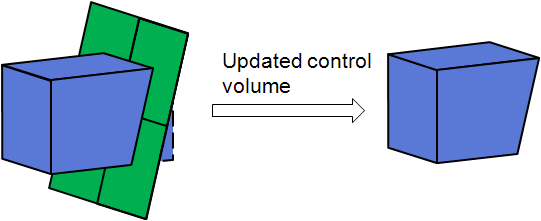
In more detail, the Lagrangian body covers regions of the Euler domain. The intersection between the Lagrangian and Eulerian bodies results in an updated control volume on which the conservation equation of mass, momentum and energy are solved.
At the same time, the normal stress in the intersected Euler cell will act on the intersected area of the Lagrangian surface.
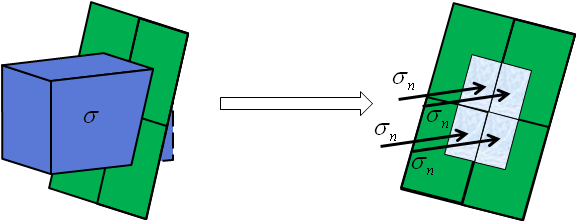
This provides a two-way closely coupled fluid-structure (or more generally Eulerian-Lagrangian) interaction. During a simulation, the Lagrangian structure can move and deform. Large deformations may also result in erosion of the elements from the Lagrangian body. The coupling interfaces are automatically updated in such cases.
For accurate results when coupling Lagrangian and Eulerian bodies in Explicit Dynamics it is necessary to ensure that the size of the cells of the Euler domain are smaller than the minimum distance across the thickness of the Lagrangian bodies. If this is not the case, you may see leakage of material in the Euler domain through the Lagrange structure.
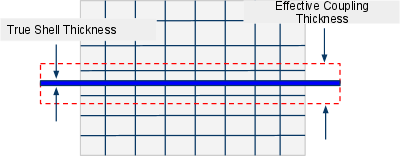
In the case of coupling to thin bodies (typically modelled with shells), an equivalent solid body is generated to enable intersection calculations to be performed between a Lagrangian volume and the Euler domain. The thickness of the equivalent solid body is automatically calculated based on the Euler Domain cell size to ensure that at least one Euler element is fully covered over the thickness and no leakage occurs across the coupling surface. Note this 'artificial' thickness is only used for volume intersection calculations for the purposes of coupling and is independent of the physical thickness of the shell/surface body.
The Lagrangian reference frame is most frequently used to model solid structures with materials which have soundspeeds in the order of several thousand meters/second. The Eulerian reference is most frequently used to represent fluids or gases which typically have soundspeeds in the order of hundreds of meters/second. In Explicit Dynamics simulations the maximum timestep that can be used is inversely proportional to the soundspeed of the material. The timestep required to model structures is therefore often significantly smaller than the timestep required to accurately model a gas. To enable the Lagrangian and Eulerian parts of a coupled simulation proceed at the optimum timestep (for efficiency and accuracy) a sub-cycling technique is used where possible. The Lagrangian domain uses its critical timestep. The Euler domain uses its critical timestep. Coupling information is exchanged at the end of each Euler domain timestep.