


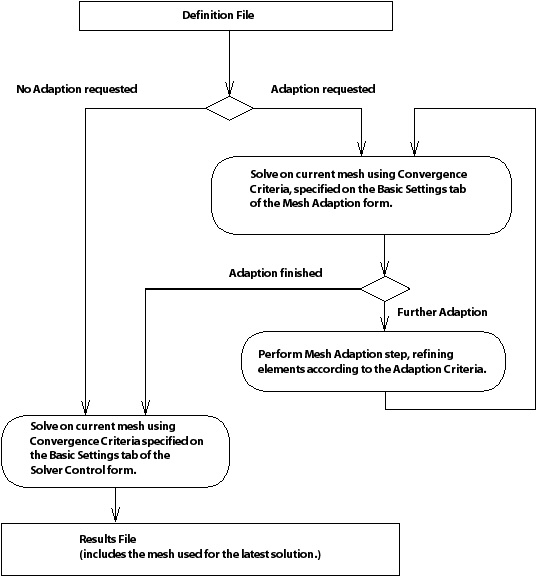
The following will take place when CFX-Solver is run (on steady-state problems). The process is shown in the diagrammatic form below (Figure 25.1: Mesh Adaption Process).
The CFX-Solver solves for solution variables using the mesh that is contained in the CFX-Solver input file, or specified using an initial values file. The CFX-Solver uses Convergence Criteria that have been specified on the Basic Settings tab of the Mesh Adaption form; the Convergence Criteria specified on the Solver Control form is not used at this stage.
A Mesh Adaption Step (one loop of the adapt-solve cycle) takes place. Using the solution calculated in this first step, together with the Adaption Criteria specified on the Mesh Adaption Basic Settings form, the mesh is refined in selected areas. For details, see Mesh Adaption in the CFX-Solver Theory Guide.
The CFX-Solver solves for solution variables using the mesh created by the Mesh Adaption step. The CFX-Solver uses the Convergence Criteria specified on the Basic Settings tab of the Mesh Adaption form; the Convergence Criteria specified on the Solver Control form is not used at this stage.
Steps 2 and 3 are repeated until the Max. Num. Steps (specified on the Basic Settings of the Mesh Adaption form) is reached.
Finally, CFX-Solver solves for solution variables using the mesh that was created by the final Mesh Adaption step. The Convergence Criteria used by the CFX-Solver at this stage are those specified on the Solver Control form.
The Mesh Adaption step itself consists of the following:
The Adaption Criteria are applied to each edge of each element in the mesh.
Nodes are added to the existing mesh according to the Adaption Criteria. The number of nodes added is dependent on the total number of nodes to be added and the node allocation parameter.
The solution already calculated on the older mesh is linearly interpolated onto the new mesh.
If the CFX-Solver is being run in parallel, then each "Solve" step is preceded by a mesh partitioning step.
Additional information on how elements are selected for adaption, how elements are divided, and the limitations of mesh adaption in CFX is available in Mesh Adaption in the CFX-Solver Theory Guide.