


Aqwa allows structures to be connected by articulated joints. These joints do not permit relative translation of the two structures but allow relative rotational movement in a number of ways that can be defined by the user. The local articulation axes (LAA) or Axyz is shown in Figure 1.2: Local Articulation Axes.
The local articulation axes are a local right handed coordinate system based on the following constraint types:
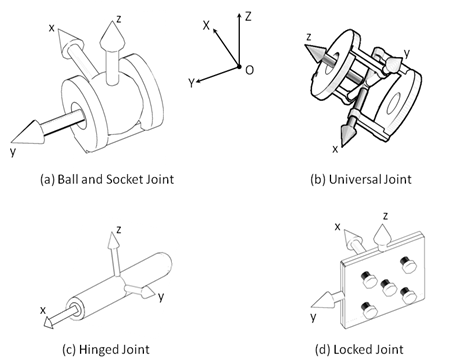
- Ball and Socket Joint:
The origin is located at the connecting point, with the local x-, y-, and z-axes parallel to the X-, Y-, and Z-axes of the FRA at the initial position.
- Universal Joint:
The origin is located at the connecting point, with the local x- and y-axes parallel to the two freely rotational freedoms. The local z-axis is at right angles to the local x- and y-axes.
- Hinged Joint:
The origin is located at the connecting point, with the local x-axis parallel to the hinge axis. The local y-axis is at right angle to the local x-axis and in the OXY plane of the FRA at the initial position. In cases where the hinge axis is parallel to the Z-axis of the FRA in the initial position, the local y-axis will be parallel to the Y-axis of FRA.
- Locked Joint:
The origin is located at the connecting point, with the local x-, y- and z-axes parallel to the X-, Y- and Z-axes of the FRA at the initial position.