


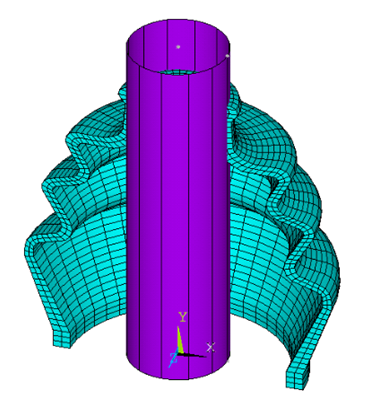
A rubber boot seal with half symmetry is considered for this analysis. There are three contact pairs defined; one is rigid-flexible contact between the rubber boot and cylindrical shaft, and the remaining two are self contact pairs on the inside and outside surfaces of the boot.
The problem is solved in three load steps:
Initial interference between the cylinder and boot
Vertical displacement of the cylinder (axial compression in the rubber boot)
Rotation of the cylinder (bending of the rubber boot)