


[傾斜度と収束度] (Dipvergence/Convergence)

双眼系の傾斜度と収束を表示します。
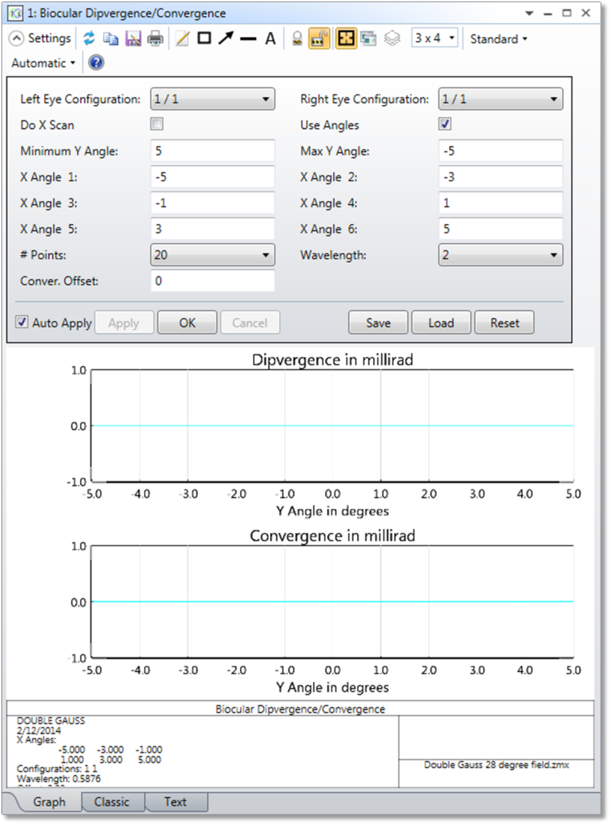
[左眼コンフィグ] (Left Eye Config) 左の基準眼として使用するコンフィグレーションを定義します。
[右眼コンフィグ] (Right Eye Config) 右の基準眼として使用するコンフィグレーションを定義します。この傾斜度と収束は左眼を基準として測定します。
[X 走査を実行] (Do X Scan) チェックすると、プロットの走査は視野の X 方向に実行され、チェックしない場合は視野の Y 方向に実行されます。
[角度を使用] (Use Angles) チェックすると、視野の単位が度になり、チェックしない場合、単位は方向余弦になります。
[最小 X 角度] (Min X Angle)、[最大 X 角度] (Max X Angle)、[最小 Y 角度] (Min Y Angle)、[最大 Y 角度] (Max Y Angle)、[最小 X コサイン] (Min X Cosine)、[最大 X コサイン] (Max X Cosine)、[最小 Y コサイン] (Min Y Cosine)、[最大 Y コサイン] (Max Y Cosine) 余弦空間単位または度単位で、X 方向または Y 方向の走査の限界を設定します。それぞれの最大値と最小との間で対称な限界値にする必要はなく、最小値を最大値よりも小さくする必要もありません。
[X 角度 1] (X Angle 1)、[X 角度 2] (X Angle 2)、[X 角度 3] (X Angle 3)、[X 角度 4] (X Angle 4)、[X 角度 5] (X Angle 5)、[X 角度 6] (X Angle 6)、[Y 角度 1] (Y Angle 1)、[Y 角度 2] (Y Angle 2)、[Y 角度 3] (Y Angle 3)、[Y 角度 4] (Y Angle 4)、[Y 角度 5] (Y Angle 5)、[Y 角度 6] (Y Angle 6)、[X コサイン 1] (X Cosine 1)、[X コサイン 2] (X Cosine 2)、[X コサイン 3] (X Cosine 3)、[X コサイン 4] (X Cosine 4)、[X コサイン 5] (X Cosine 5)、[X コサイン 6] (X Cosine 6)、[Y コサイン 1] (Y Cosine 1)、[Y コサイン 2] (Y Cosine 2)、[Y コサイン 3] (Y Cosine 3)、[Y コサイン 4] (Y Cosine 4)、[Y コサイン 5] (Y Cosine 5)、[Y コサイン 6] (Y Cosine 6) [X 走査を実行] (Do X Scan) をチェックすると、最大 6 つの Y 角度のオフセットと Y 余弦のオフセットを表示用に選択できます。[X 走査を実行] (Do X Scan) のチェックをはずすと、最大 6 つの X 角度のオフセットと X 余弦のオフセットを表示用に選択できます。いずれかのオフセット値をオフにするには、その値を -99 に設定します。
[点の数] (# Points) すべての走査で使用する点の数。
[波長] (Wavelength) 計算に使用する波長の番号です。
[収束値オフセット] (Convergence Offset) 計算された収束値からこの値が減算されます。これにより、目的の値からの偏差のみが表示されます。
説明
双眼レンズを通して同じ像点を両眼で見る場合、その像点を見る方向の角度にそれぞれの眼でわずかな差があることが普通です。
- その角度のうち、垂直方向 (上下方向) の角度を傾斜度といいます。
- 水平方向 (左右方向) の角度を収束度または発散度と呼びます。
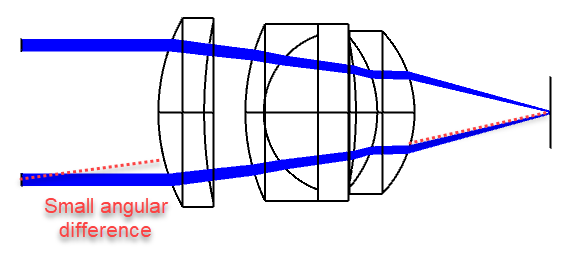
- 観測者が、その前方にあるひとつの点を両眼で注視している状態が収束です。この場合は、両眼の位置を出発した 2 本の主光線は、レンズに向かって観測者の頭から遠ざかるほど一点に向かって収束します。
- 2 本の主光線が、レンズに向かって伝搬するに伴って互いに離れてゆく状態が発散です。これは、観測者後方の虚像点を見ているような状態です。
- 計算の観点からすれば、収束と発散は同じ概念です。OpticStudio で採用している一般則では、収束は正の値で、発散は負の値です。このことから、以降の説明ではどちらも収束という用語で表現します。収束が負の値であれば発散という呼び方ができるという点を理解しておく必要があります。収束は発散よりも許容できることが普通なので、それぞれに指定する各種の値は互いに異なっていることがあります。
傾斜度と収束は両方ともミリラジアン単位で測定され、視覚系での一般的な限界は 1.0 ミリラジアン程度です。
左眼のコンフィグレーションで基準光線を追跡することにより、視野にある所定の点のデータを計算できます。つづいて、同じ角度の主光線を右眼のコンフィグレーションで追跡します。一般的に、像面上で左眼の基準光線が到達する位置の X 座標と Y 座標に、右眼の光線は正確には到達しません。OpticStudio では、右眼の主光線到達位置が左眼の基準光線の到達座標に一致するまで、右眼の光線追跡を反復します。その結果、右眼の主光線の角度は、左眼の主光線の角度に対して垂直方向と水平方向の両方でわずかな角度差を持つようになることが普通です。これがそれぞれ傾斜度と収束になります。
この機能では、以下の点を前提としています。
- 視野は、度または方向余弦の単位で直接指定します。
- 像面は、眼球が見ている像の位置です。選択した各コンフィグレーションは、1 つの眼球の位置を示します。この眼球の位置はディセンタされていることが普通です。
- 眼球のディセンタは、像面の X 座標と Y 座標がすべてのコンフィグレーションで像の光源の同じ位置を示すように設定します。たとえば、像の光源が CRT の場合、像の座標で特定の位置 (x = 1、y = 2) にある点は、どのコンフィグレーションでも CRT 上の物理的に同じ位置に相当している必要があります。
- すべての面は、視野の外部を通る光線をビネッティングする固定アパチャーを備えている必要があります。
有効な計算を実現するために、左眼と右眼それぞれの主光線は、エラーやビネッティングなどを伴わずにすべての面を通過する必要があります。どちらの光線も追跡しない場合、その視野ではデータが返されません。コンフィグレーションどうしで重複した視野を設定すると、適切な最大走査値と最小走査値を設定するうえできわめて効果的です。視野の重複の決定については、「視野」を参照してください。
右眼で必要な光線追跡の反復が失敗することがあります。これは通常、計算の解が存在しないか、傾斜度と収束が大き過ぎるためにアルゴリズムが不安定になって発生します。光線追跡の反復失敗は、プロットの中で間隙として表示されることが普通です。
次へ :