

The following sections present the new features, enhancements and changes for the AVxcelerate SensorsTM solution 2025 R2 release.
This section describes the new features introduced in AVxcelerate Sensors Simulator 2025 R2 release.
The new Light Propagation Engine, also referred to as LPE, released as a beta feature, is a powerful rendering engine that you can now use for camera simulations instead of the default rendering engine.
The Light Propagation Engine not only offers a better and more realistic rendering, it also increases the simulation speed.
If you want to use the Light Propagation Engine for camera simulations, you need the AVxcelerate Sensors Library for LPE, which provides you with resources (assets and tracks) specifically prepared for this rendering engine. To do so, you must select this option when installing the AVxcelerate Sensors solution.
You will then have to configure the LPE Parameters in the camera simulation parameters. You will find three examples of simulation parameters files in the dedicated library.
The DDMA feature, which stands for Direct Data Memory Access, is a new method to get the output data produced by sensors.
Note: In this release, DDMA is delivered as a beta feature available on Windows only, and it supports output data of physics-based camera sensors only.
Particularly suited for HiL and SiL use cases, DDMA offers better performance compared to data access from the shared memory since it provides direct access to raw data in CPU.
Thanks to the DDMA Software Development Kit (SDK) delivered in the product, you can develop your own dynamic link library (dll) customized to your needs.
The RDMA SDK is composed of:
the CPU DDMA sample, which demonstrate how to build a custom dll that will be used to retrieve camera output data from the CPU,
the ProcessSensorData.h header file, which defines the API methods that should be implemented in your code,
the DDMA extension, which enables AVxcelerate Sensors Simulator to dynamically load and execute a custom dll during a simulation.
For more information, refer to the readme file provided in the sample folder or to the Raw Data Output for DDMA page of the User's Guide.
In order to perform a radar simulation in a context which more closely resembles real word scenarios, in the 2025 R2 release of AVxcelerate Sensors Simulator, it is now possible to simulate phase noise in radar modes with a System FMCW or Performance FMCW waveform. To create a radar model with phase noise, use the Sensor Labs application, or the Sensors REST API to model phase noise in one of three ways:
using custom values for the Pedestal Model (Pedestal Parametric Model)
using Preset values based on the Pedestal Model
using the Piecewise Linear Model.
To simulate phase noise, simply add your radar to a sensor layout, configure the radar simulation parameters, and run the simulation. For more information on this parameter, refer to the Mode Configuration Parameters.
To counteract the aliasing phenomenon and improve the signal-to-noise ratio (SNR), you can now add range filters to your sensor model using the Sensor Labs application or the Sensors REST API. Set at the mode level, you can configure up to two range filters per mode in a radar model. You can use one of three ways to define attenuation and create:
low-pass filters to suppress low-frequency components,
high-pass filters to suppress high-frequency components,
both a low-pass and a high-pass filter to mimic the behavior of a bandpass filter.
For more information, refer to Range Filter or to the Mode Configuration Parameters in the AVxcelerate Sensors Simulator User's Guide.
In the 2025 R2 release of AVxcelerate Sensors Simulator, you can optimize performance when executing consecutive simulation runs thanks to the ability to perform a simulation reset. Using the simulation control procedures, you can now call an Initialize command directly after a Stop command. This triggers the resetting of the scenario using the resources that were loaded from the initial simulation for each subsequent simulation run, thereby optimizing on load time. In the current release:
only sensors and advanced lighting systems are automatically reset.
any changes to the asset or track during the previous simulation run must be manually reset to the desired initial settings through a world update during the Initialize command. This includes for example, changes in asset positions, orientations, states, date/time.
noise is not reset.
When a simulation reset is performed and depending on your data access settings, the output files are organized accordingly. Refer to the Results section of the AVxcelerate Sensors Simulator User's Guide for more information.
Note: Simulation reset is a beta feature in the 2025 R2 release. For more information, see Simulation States and Transitions in the AVxcelerate Sensors Simulator User's Guide.
This section describes the enhancements introduced in AVxcelerate Sensors Simulator 2025 R2 release.
Leveraging National Instruments RDMA technology, the RDMA feature of AVxcelerate Sensors Simulator allows you to transfer raw data generated by physics-based camera sensors to an RDMA receiver.
Note: In this release, RDMA is delivered as a beta feature available on Windows only.
In the previous release, you could transfer camera data via RDMA only by using the pre-built RDMA sender available on demand.
In the 2025 R2 release, you now have two options to transfer raw data via RDMA:
using the pre-built RDMA sender, which is still provided upon request to Ansys Support,
using a custom dll, which should be built based on:
the NI RDMA SDK,
the DDMA SDK,
the resources provided in the CPU RDMA sample.
Using a custom dll has the many advantages over using the pre-built RDMA sender.
First, when developing a custom dll, you can add any data post-processing or conversion steps you need, for example to convert RGBA data to aRGB, or to turn the spectral irradiance map data produced by a camera with the Lens Output (Light) output type into an RDMA compatible format.
Also, the sensor identifier being provided as a metadata, along with all the information needed to decode the data, it is possible to get the output data of several camera sensors. When using the pre-built RDMA sender, the sensor identifier is not part of the metadata, data identification is based on the timestamp only, which is error-prone when retrieving the output data of several sensors.
Finally, the connection between the receiver and the sender can be established faster.
In order to ease the configuration of sensor layouts including thermal camera models, the Sensor Labs applications and REST APIs now partially support thermal cameras.
You can now:
upload, edit and download sensor layout files (*.sencfgx) that contain thermal camera sensors using the Sensor Layout application or Sensor Layouts REST API v2,
see the thermal camera sensors in your Sensors Library and download them as .*thermalpbcamx files using the Sensor Modeler application or Sensors REST API v7,
| Layout containing a thermal camera | Thermal camera in Sensors Library |
 |
 |
Important notes: The thermal camera sensor models cannot be opened or edited using the Sensor Modeler application, nor be created, updated or read using Sensors REST API v7.
The simulation of a thermal camera sensor now produces temperature maps only, available as text files or as serialized byte arrays in the shared memory. Grayscale images in png format are no longer generated.
This is a breaking change that requires you to update the simulation parameters of your thermal camera sensor so that the camera recording format must be set to TEMPERATURE_MAP instead of PNG if you want to save the thermal camera output files to disk.
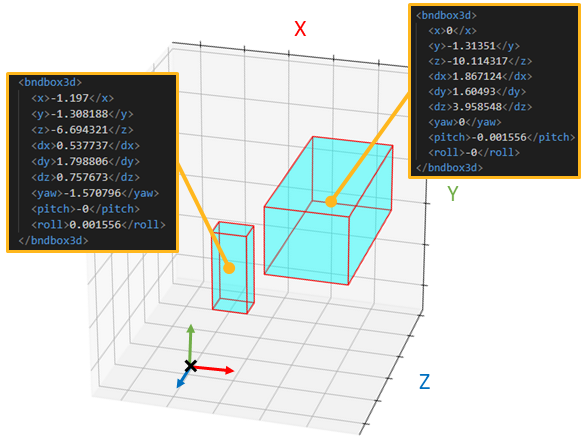
3D bounding boxes are now part of the ground truth data that camera sensors can generate.
The 3D bounding box data are generated along with the 2D bounding box data when the generate2dBoundingBoxes camera simulation parameter is set to true. The 2dboundingboxes.xml files now includes both the 2D and 3D bounding boxes.
While a 2D bounding box is defined with pixel coordinates in the image frame, a 3D bounding box is defined by:
the position of its isobarycenter specified with the x,y and z coordinates in the camera reference frame, expressed in meters,
its dimensions, with dy being the height, dx the width and dz the depth of the bounding box, expressed in world meters,
its orientation relative to the camera's axis system as a yaw - pitch - roll sequence, expressed in radians.
For more details, refer to the Bounding Box section of the Camera Ground Truth Output Data page.
Note: In this release, 3D Bounding box is delivered as a beta feature.
The following sensors simulation improvements have been made in the AVxcelerate Sensors 2025 R2 release:
It is now possible to optimize simulation performance by adding the new
-s|--singleExecutableargument to run a single-sensor simulation using only the avxcelerate.sensorssimulator.exe. Refer to Simulation Process Arguments for more information on using this simulation argument.Surface curvature can now be taken into account in the time of flight calculation for LiDAR simulation thanks to the addition of the
enableSurfaceSmoothingparameter in the LiDAR Simulation Parameters.
This section describes the changes introduced in AVxcelerate Sensors 2025 R2 release.
Ubuntu 24.04 is now a Linux distribution compatible with AVxcelerate Sensors Simulator. Ubuntu 20.04 is no longer supported. For the complete list of compatible operating systems and distributions, refer to the Platform Support by Application / Product document published here on the Ansys Website.
AVxcelerate Sensors Simulator is now also compatible with SCANeRstudioTM version 2023.2.
On Windows, you can now install the AVxcelerate Sensors Library for SCANeR either for SCANeRstudioTM version 2021.1 or for SCANeRstudioTM version 2023.2.
On Linux however, SCANeRstudioTM is no longer supported.
When installing the AVxcelerate Sensors solution, its main software components are no longer installed in Optical Products/VRXPERIENCE on Windows and OpticalProducts/VRXPERIENCE on Linux, the subfolders are now named Autonomy/AVxcelerateSensors. The same changes have been made to the folders in %appdata%, %localappdata% and %programdata%.
The below-listed executable, log and configuration files have also been renamed.
| 2025 R1 | 2025 R2 |
|---|---|
| VRXPERIENCE.SensorsSimulator.exe | avxcelerate.sensorssimulator.exe |
| Imagine.Pre.VssSpawner.exe | avxcelerate.sensorprocess.exe |
| VRXPERIENCE_Sensors_dataAccessServer.exe | avxcelerate.sensorsdataaccessserver.exe |
| VRXPERIENCE_SENSORS.exe | avxcelerate.scanerconnector.exe |
| VRXPERIENCE.SensorsSimulator.log | avxcelerate.sensorssimulator.log |
|
Imagine.Pre.VssSpawner[...].log | avxcelerate.sensorprocess[...].log |
|
VRXPERIENCE.SensorsSimulator.dll.config | avxcelerate.sensorssimulator.dll.cong |
| Imagine.Pre.VssSpawner.dll.config | avxcelerate.sensorprocess.dll.config |