


Rubber boot seals are used in many industrial applications to protect the flexible joint between two bodies. In the automotive industry, rubber boot seals cover constant velocity joints on the drive shaft to protect them from the outside elements (dust, humidity, mud, etc.). These rubber boots are designed to accommodate the maximum possible swing angle of the joints and to compensate for changes in the shaft length.
This rubber boot seal example demonstrates geometric nonlinearities (large strain and large deformation), nonlinear material behavior (rubber), and changing status nonlinearities (contact). The objective of this example is to show the advantages of the surface-projection-based contact method and to determine the displacement behavior of the rubber boot seal, stress results, and location of the contact point on the outer surface and inner surface of the boot during the shaft motion.
Surface-projection-based contact can be defined by setting KEYOPT(4) = 3 for the contact elements using the option indicated below for the contact region.
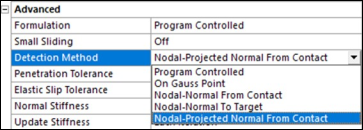
This option enforces contact constraints on an overlapping region of contact and target surfaces rather than on individual contact nodes or gauss points. The contact penetration/gap is computed over the overlapping region in an average sense.