


There are three types of Geometry Predef objects you can use - Box, Cylinder and Sphere. These are described below.
- Box
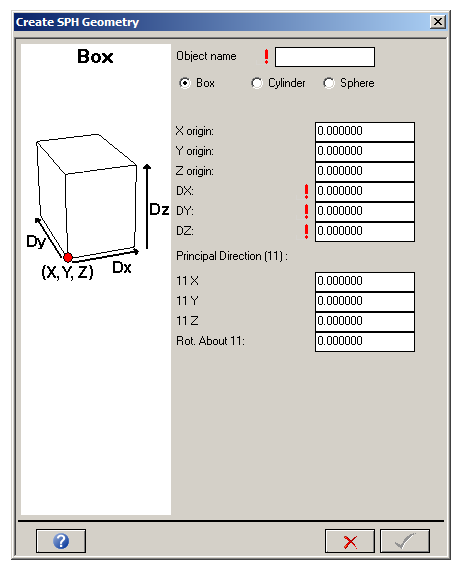
Define the box by entering the XYZ coordinates of the origin, and the size in each of its three directions. The orientation of the box is defined by a principal direction vector and a rotation about this vector. When the box is defined, a wire-frame representation is shown on the screen, together with an arrow displaying the principal vector direction.
- Cylinder
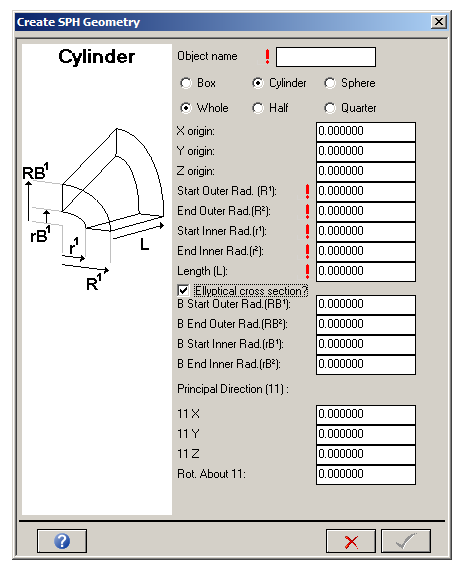
You may define either a whole, half or quarter cylinder by selecting the appropriate option. To define the cylinder, first enter the XYZ coordinates of the start of the cylinder axis. You are then prompted for the start and end radius of the cylinder. If you want to define a hollow cylinder, enter inner radii for the start and end of the cylinder; to define a solid cylinder, leave these two values as zero.
You may also define a cylinder that is elliptical in cross-section. To do this you must provide extra radii information. This is indicated on the figure on the left hand side of the window.
The orientation of the cylinder is defined by a principal direction vector, which corresponds to the axis of the cylinder and a rotation about this vector. When the cylinder is defined, a wireframe representation is shown on the screen, together with an arrow displaying the principal vector direction.
- Sphere
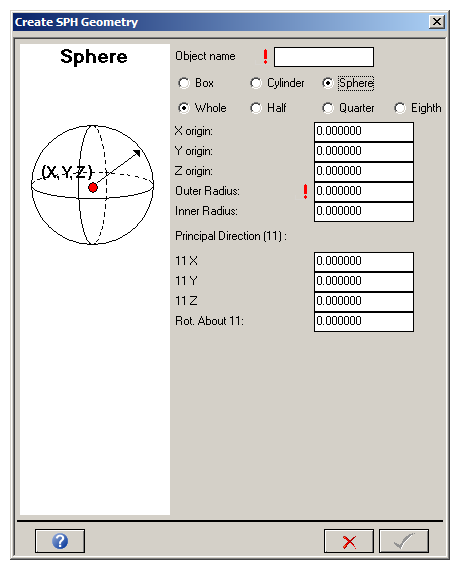
You may define either a whole, half, quarter or eighth sphere by selecting the appropriate option. To define the sphere, enter XYZ coordinates of the sphere origin and an outer radius. You may specify a hollow sphere by entering an inner radius.
The orientation of the sphere is defined by a principal direction vector and a rotation about this vector. When the sphere is defined, a wireframe representation is shown on the screen, together with an arrow displaying the principal vector direction.