


The First Order Reliability Method or FORM (see The Hasofer and Lind Reliability Index in Madsen, Krenk, and Lind 1986) is a well established method for reliability calculation (Eurocode EN 1990). It provides an analytical solution based on assumptions and simplifications. Therefore, it fast to compute, but in special cases it may be not accurate. The method provides no measure of accuracy (such as, e.g. a confidence level).
The FORM result is defined in the space of standard normal variables U, thus suitable transformations are required, see the
previous section. If the mean vector  is transformed such, it coincides with the origin of the U-space.
is transformed such, it coincides with the origin of the U-space.
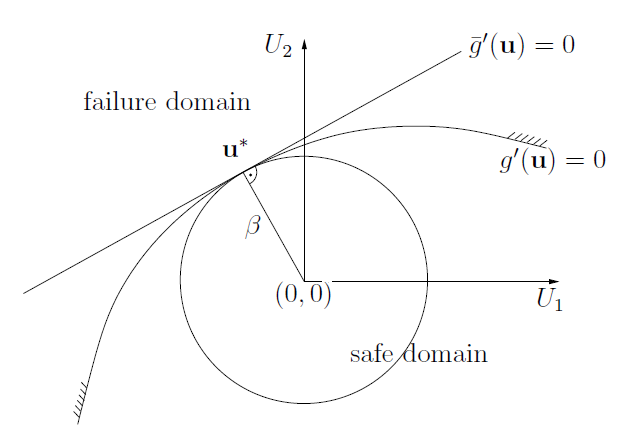
Table 5.1: Values β For Different Probabilities of Failure
| Pf | 10-1 | 10-2 | 10-3 | 10-4 | 10-5 | 10-6 | 10-7 |

| 1.28 | 2.33 | 3.09 | 3.72 | 4.26 | 4.75 | 5.20 |
The geometrical distance from the origin of the U-space to any point on the transformed failure surface g'(u) = 0 corresponds to the respective distance between mean vector and failure surface in original space, as expressed by multiples of standard deviations. The point on the failure surface with largest probability density corresponds to the smallest distance, which is denoted as the reliability index
 | (5–11) |
Figure 5.2: Linearisation at the Design Point illustrates this geometrical interpretation. Hence the algorithm has to find the point with minimal distance to the origin of U-space. This is the so-called design point u *. It can be found by any optimization algorithm (Bucher 2009).
If the limit state function is linearized at the design point, the corresponding probability of failure can be computed as
 | (5–12) |
where  is the standard normal cumulative distribution function. This solution
is exact only for the special case that the failure surface is linear in U-space.
is the standard normal cumulative distribution function. This solution
is exact only for the special case that the failure surface is linear in U-space.
The success of the method depends largely on the success of the optimization algorithm, so the same requirements as for optimization tasks hold. If a gradient-based optimizer is applied, the limit state function (in U-space) must be continuous and sufficiently smooth. The design point must be unique. If the failure surface is not linear at the design point, then the failure probability computed by linearization may become inaccurate. However, this inaccuracy is overlaid by other sources of uncertainty and diminishes to some extent with increasing distance.
Generalized Reliability Index
If the probability of failure is computed by any other method than FORM, the reliability index can be obtained from inversion of Equation 5–12. This so-called generalized reliability index is a scaled representation of the probability of failure. See (Madsen, Krenk, and Lind 1986) for further considerations on this topic. Table 5.1: Values β For Different Probabilities of Failure lists typical values of the relation β vs. Pf .