


The first tasks of a reliability analysis are to specify the random input variables with their properties, i.e. distribution types, stochastic moments and correlations (see Definition of Uncertainties and Distribution Types) and to formulate the requirements on the product to be analyzed. The failure criterion does not necessarily indicate collapse of the system, any state of the system that violates quality, serviceability or safety requirements can be formulated as follows: A function of the input random variables g(x) scaled such that
 | (5–1) |
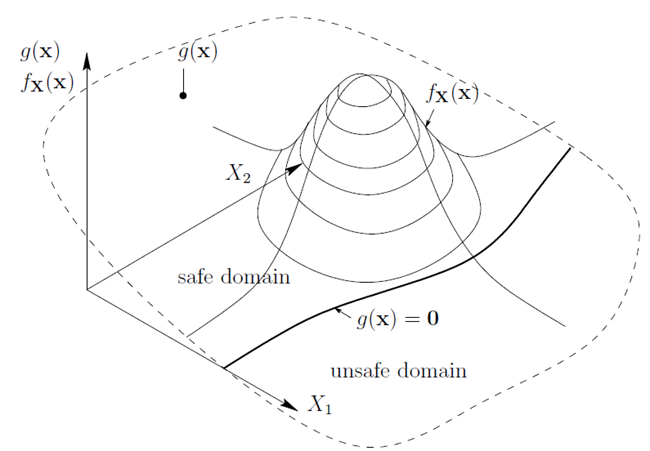
is called limit state function. g(x) = 0 marks the transition from the safe state to the failed state and is called failure surface (Madsen, Krenk, and Lind 1986). Often the limit state function cannot be formulated directly depending on input random variables, but is implicitly given by the result of a simulation of the examined system.
This is called an implicit limit state. A typical example is g(r, s) = r -s with r, the resistance (ultimate stress) and s, computed stress of a structure.
With this definition, the space of all involved variables  can be separated into the safe domain and the failure domain
can be separated into the safe domain and the failure domain
 | (5–2) |
The probability of failure Pf is the probability of the event that x falls into the failure domain.
 | (5–3) |
and can be computed as the integral of the joint density of all random variables over
the failure domain 
 | (5–4) |
Figure 5.1: Reliability Problem in Two Dimensions helps to visualize these definitions for the case of two random variables.
The limit state function may comprise several failure criteria. Two basic cases are demonstrated in the following. A system consisting of several components which fails entirely, if just one of its components fails, is called a series system or weakest link system. (Think of a chain under tension.) The probability of failure for the case of independent single failure modes is
 | (5–5) |
and the limit state function is computed as
 | (5–6) |
|
|
|
Sketch of the reliability problem in two dimensions. f X(x): joint prob- ability density, g(x): limit state function, g(x) = 0: limit state surface. |
A parallel system, in contrast, has redundancy. The system fails when all components have failed. (E.g., a wire rope.) Then
 | (5–7) |
 | (5–8) |
When setting up a reliability analysis in optiSLang, always the safe case, g(x) > 0 is formulated. If several criteria are given by several lines in the limit states table, they are automatically interpreted as series system.