


An initial prototype, which exposes the use of (Virtual) Eulerian surface bodies in the Explicit Dynamics analysis system, is available through the Euler Enhancements beta feature flag. To set up this flag in Workbench, follow these steps:
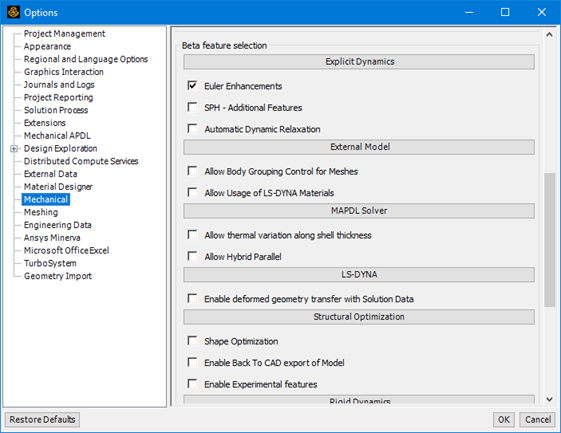
Open the > dialog.
Check the box next to the option in the tab.
Two different (Virtual) Eulerian surface body options are supported for mapping material and initial conditions into 3D Euler:
Volume filling of the Eulerian domain, using closed single connected surface bodies
Directional filling of the Eulerian domain, using surface bodies with a defined filling direction
Mapping of Surface Bodies with Euler Reference Frame to Virtual Euler Domain
The standard mesh, which is generated on surface bodies marked with Eulerian (virtual) reference frame, is only used to represent the geometry of the surface body during initialization of the model for the solver. The material and initial conditions defined on surface bodies, which are marked as an Eulerian reference frame, are mapped to the Euler domain. The mesh associated with the original surface body is then deleted, prior to the solve. A unique material is created for each surface body that is mapped into the Euler domain for post processing.
If multiple solid and surface bodies marked as overlap, the body higher in the view will take precedence. Therefore, the material assigned to the region of overlap will correspond with the material assigned to the first Eulerian body.