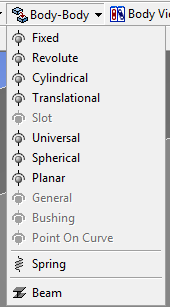
*CONSTRAINED_JOINT_LOCKING
This keyword is created for a body to body fixed joint in the mechanical GUI.
*CONSTRAINED_JOINT_REVOLUTE
This keyword is created for a body to body revolute joint in the mechanical GUI.
*CONSTRAINED_JOINT_TRANSLATIONAL
This keyword is created for a body to body translational joint in the mechanical GUI.
*CONSTRAINED_JOINT_CYLINDRICAL
This keyword is created for a body to body cylindrical joint in the mechanical GUI.
*CONSTRAINED_JOINT_UNIVERSAL
This keyword is created for a body to body universal joint in the mechanical GUI.
*CONSTRAINED_JOINT_SPHERICAL
This keyword is created for a body to body spherical joint in the mechanical GUI.
*CONSTRAINED_JOINT_PLANAR
This keyword is created for a body to body planar joint in the mechanical GUI.
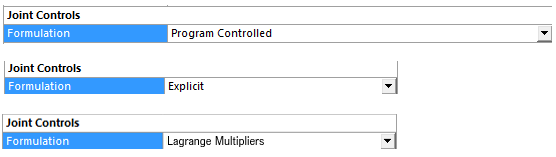
*CONTROL_RIGID
Specify the explicit rigid body joint treatment. It can use an implicit formulation which uses Lagrange multipliers or penalty.
LMF is written according to the selection in the GUI.